Compare commits
278 Commits
| Author | SHA1 | Date | |
|---|---|---|---|
|
|
d78f2b8650 | ||
|
|
5e5df483e2 | ||
|
|
009ec9e1d4 | ||
|
|
a08dc374c8 | ||
|
|
5b0ec742c4 | ||
|
|
04e28bc2d8 | ||
|
|
966b9e8c61 | ||
|
|
5f75619063 | ||
|
|
03ff9357d7 | ||
|
|
d05032963d | ||
|
|
7d9f9a627c | ||
|
|
2d19908119 | ||
|
|
d487e1c466 | ||
|
|
159b848234 | ||
|
|
53e6890f20 | ||
|
|
83c124f7fc | ||
|
|
05348f3981 | ||
|
|
e40c8fbca0 | ||
|
|
27684eef60 | ||
|
|
cc740c92c9 | ||
|
|
e673304221 | ||
|
|
974fcec21e | ||
|
|
36e3a1f72e | ||
|
|
5993e79e00 | ||
|
|
484e8d4298 | ||
|
|
fa2034d30b | ||
|
|
a84d681782 | ||
|
|
ab844a77b8 | ||
|
|
6c7a174424 | ||
|
|
474e4f07f8 | ||
|
|
7c254ec5dc | ||
|
|
09a741f540 | ||
|
|
a540d2dd3f | ||
|
|
3f8c406898 | ||
|
|
6065a3d70c | ||
|
|
34e9d5084c | ||
|
|
a56101197a | ||
|
|
2a82393c8e | ||
|
|
418eada0b5 | ||
|
|
b2e70a7257 | ||
|
|
b7a2636e97 | ||
|
|
d0e5e169cc | ||
|
|
7e18424d11 | ||
|
|
00d307439c | ||
|
|
5df189d306 | ||
|
|
bd1c5c0330 | ||
|
|
77e75b9975 | ||
|
|
e506ac6b28 | ||
|
|
88bc63cf82 | ||
|
|
a05542c06c | ||
|
|
ffc4e06ac6 | ||
|
|
81076375b8 | ||
|
|
66f369f3a9 | ||
|
|
7cba7b432d | ||
|
|
dd98d96d7e | ||
|
|
8ede892c14 | ||
|
|
08c62ab8cd | ||
|
|
e8efef476b | ||
|
|
c6403a65d2 | ||
|
|
6a8d638853 | ||
|
|
782929b006 | ||
|
|
4997ad9115 | ||
|
|
857a30d980 | ||
|
|
a40e69cca0 | ||
|
|
e069a79a32 | ||
|
|
d9dfe15bfe | ||
|
|
1dbd2e5990 | ||
|
|
7e9da4133d | ||
|
|
163b5c9c81 | ||
|
|
c6a3638a2f | ||
|
|
44f78cb03e | ||
|
|
61552ad6ca | ||
|
|
fa66ed866c | ||
|
|
08b4bd1f03 | ||
|
|
c536a1c312 | ||
|
|
adb18fe711 | ||
|
|
7d1e748b0e | ||
|
|
3a9d22c76b | ||
|
|
417e1a65b6 | ||
|
|
5762167186 | ||
|
|
faa9eb0093 | ||
|
|
005363c5cd | ||
|
|
478723ca2c | ||
|
|
05dcfa2a13 | ||
|
|
eff95c09f1 | ||
|
|
097e641789 | ||
|
|
f107c94d05 | ||
|
|
93242edc86 | ||
|
|
eb395414ab | ||
|
|
04191efc51 | ||
|
|
9bbf49bc6b | ||
|
|
dfed7e3621 | ||
|
|
4dc4ae88de | ||
|
|
c50c657193 | ||
|
|
c04e13ef93 | ||
|
|
5f3dc152c3 | ||
|
|
a64491a59e | ||
|
|
a7319ce1d6 | ||
|
|
02c94ea7ed | ||
|
|
c7ed37789e | ||
|
|
744e522aea | ||
|
|
af03ae0a8b | ||
|
|
31ec9baa95 | ||
|
|
1fc93bd05d | ||
|
|
5bee683661 | ||
|
|
b3d74e56a0 | ||
|
|
b5d48a6503 | ||
|
|
2ea4da0f1e | ||
|
|
152b4391b8 | ||
|
|
4b2787a8b2 | ||
|
|
d8de4a7863 | ||
|
|
14f7155a23 | ||
|
|
d188c37466 | ||
|
|
14fcc5d485 | ||
|
|
1d8d934a8a | ||
|
|
bdb2949b4b | ||
|
|
4cf1c7eee4 | ||
|
|
04ec99f17a | ||
|
|
150561abf2 | ||
|
|
58a0597c86 | ||
|
|
a842581785 | ||
|
|
8dcf0b31a2 | ||
|
|
a99a8e750b | ||
|
|
a0b22cd8a3 | ||
|
|
5d55d215ec | ||
|
|
625dacb020 | ||
|
|
fc8ecac376 | ||
|
|
75e2498f53 | ||
|
|
7a4ea3dd56 | ||
|
|
5e1a93950e | ||
|
|
380546cee0 | ||
|
|
d7a7610917 | ||
|
|
37aaa49b32 | ||
|
|
937bafa8e2 | ||
|
|
3d18ded3f6 | ||
|
|
daa5842fb5 | ||
|
|
6f52267c26 | ||
|
|
acbae88d34 | ||
|
|
986c7020c3 | ||
|
|
eb7a56abaf | ||
|
|
d04c4b8231 | ||
|
|
f8e25ced89 | ||
|
|
f906295c39 | ||
|
|
aee432127a | ||
|
|
385059c233 | ||
|
|
9b61ed156c | ||
|
|
8eaa6904dd | ||
|
|
7da2ec1948 | ||
|
|
7224561b76 | ||
|
|
4c84c87cf4 | ||
|
|
8ff0d93c1f | ||
|
|
b38de6b506 | ||
|
|
388b3fa2ef | ||
|
|
028b6ea62f | ||
|
|
c961f1e22e | ||
|
|
189da52a77 | ||
|
|
48fc88c5e9 | ||
|
|
30ee91379e | ||
|
|
353a8eaaec | ||
|
|
09b1bb9e22 | ||
|
|
26f3a9977b | ||
|
|
0766d0e802 | ||
|
|
d9b6199cf0 | ||
|
|
91da7af171 | ||
|
|
471c90e8fa | ||
|
|
142e22ff24 | ||
|
|
c4b273e737 | ||
|
|
cd9dd07282 | ||
|
|
3225c079d3 | ||
|
|
95d55dc977 | ||
|
|
95236e5045 | ||
|
|
30e930f051 | ||
|
|
68adfe6034 | ||
|
|
abe95dfaa0 | ||
|
|
354f11a6d6 | ||
|
|
b7cab0431d | ||
|
|
a8daff3ed4 | ||
|
|
a0c85fc95f | ||
|
|
f33218c49c | ||
|
|
360298cc24 | ||
|
|
27cb69c094 | ||
|
|
24fb6af5f4 | ||
|
|
546058593e | ||
|
|
9e6a066561 | ||
|
|
596c87519c | ||
|
|
06f0f7d66f | ||
|
|
c38b50911d | ||
|
|
169595e56e | ||
|
|
c19d54c633 | ||
|
|
738e3646f7 | ||
|
|
50ea32c82d | ||
|
|
8c09cd2cb3 | ||
|
|
c33fd8362d | ||
|
|
2e4be684be | ||
|
|
ed6cf0f5dc | ||
|
|
4643f86438 | ||
|
|
0493ef9133 | ||
|
|
c5c2a7a6f9 | ||
|
|
f1d1d325e0 | ||
|
|
dbe566cb55 | ||
|
|
c3302045d9 | ||
|
|
ac1fc2a46b | ||
|
|
67463a020a | ||
|
|
37e9d40762 | ||
|
|
974a926e75 | ||
|
|
d1e7fd4db9 | ||
|
|
10f74bb623 | ||
|
|
3c58b05af7 | ||
|
|
9ad9b8288a | ||
|
|
fab75918da | ||
|
|
173b6d9ca8 | ||
|
|
e7e59ed2d4 | ||
|
|
dcc7ddc19b | ||
|
|
0cdd9a74d0 | ||
|
|
8c45fef62a | ||
|
|
1d9810505a | ||
|
|
8f0cc0ab8b | ||
|
|
0105df9ad4 | ||
|
|
292c7a10d4 | ||
|
|
230e73749f | ||
|
|
655909cc84 | ||
|
|
5289948b83 | ||
|
|
7b19a951ca | ||
|
|
db531f1b6a | ||
|
|
6ff7b3e143 | ||
|
|
e34b114669 | ||
|
|
f792b46eb7 | ||
|
|
19b4802094 | ||
|
|
fcca858a37 | ||
|
|
9eae7a4431 | ||
|
|
0eeedf49fc | ||
|
|
98633e9150 | ||
|
|
ed08e2a78f | ||
|
|
12cb082f1b | ||
|
|
74a051d721 | ||
|
|
9e58f5ed02 | ||
|
|
713fad6f6b | ||
|
|
1708376df8 | ||
|
|
113951100e | ||
|
|
70c2cdebe0 | ||
|
|
560f379109 | ||
|
|
00c2a25730 | ||
|
|
6535710fc4 | ||
|
|
c9a696225d | ||
|
|
010688006a | ||
|
|
2d8b1ec66d | ||
|
|
15da06b24c | ||
|
|
97d2050a99 | ||
|
|
c89acea5a6 | ||
|
|
fa5d58147a | ||
|
|
e74afb9688 | ||
|
|
5dc70e4d3f | ||
|
|
5597f5acd9 | ||
|
|
fae3116951 | ||
|
|
def37b92ba | ||
|
|
5b878fe3a3 | ||
|
|
d9c2a382f1 | ||
|
|
e125632960 | ||
|
|
d8f82bf9ee | ||
|
|
587ac478f4 | ||
|
|
bad676f67c | ||
|
|
71128d1569 | ||
|
|
7cec141341 | ||
|
|
ec66645667 | ||
|
|
39aaa34520 | ||
|
|
4a3200d0c0 | ||
|
|
01dc7ea5ce | ||
|
|
2a9502be3d | ||
|
|
39216db143 | ||
|
|
428f926ac2 | ||
|
|
4efeb3d412 | ||
|
|
6a2d83e19b | ||
|
|
1c0d92641f | ||
|
|
9653c46bdb | ||
|
|
3738e7821b | ||
|
|
0eb0a4e3c5 | ||
|
|
7666f152bb | ||
|
|
45a39f6609 |
4
.github/CODEOWNERS
vendored
@@ -1,2 +1,6 @@
|
||||
# These owners will be the default owners for everything in the repo.
|
||||
* @PhotonVision/program-devs
|
||||
docs/* @PhotonVision/doc-maintainers
|
||||
photonlib-java-examples/* @PhotonVision/doc-maintainers
|
||||
photonlib-cpp-examples/* @PhotonVision/doc-maintainers
|
||||
photonlib-python-examples/* @PhotonVision/doc-maintainers
|
||||
|
||||
394
.github/workflows/build.yml
vendored
@@ -1,12 +1,18 @@
|
||||
name: Build
|
||||
|
||||
on:
|
||||
# Run on pushes to main and pushed tags, and on pull requests against main, but ignore the docs folder
|
||||
push:
|
||||
branches: [ master ]
|
||||
branches: [ main ]
|
||||
tags:
|
||||
- 'v*'
|
||||
pull_request:
|
||||
branches: [ master ]
|
||||
branches: [ main ]
|
||||
merge_group:
|
||||
|
||||
concurrency:
|
||||
group: ${{ github.workflow }}-${{ github.head_ref || github.ref }}
|
||||
cancel-in-progress: true
|
||||
|
||||
jobs:
|
||||
build-client:
|
||||
@@ -30,8 +36,20 @@ jobs:
|
||||
name: built-client
|
||||
path: photon-client/dist/
|
||||
build-examples:
|
||||
name: "Build Examples"
|
||||
runs-on: ubuntu-22.04
|
||||
|
||||
strategy:
|
||||
fail-fast: false
|
||||
matrix:
|
||||
include:
|
||||
- os: windows-2022
|
||||
architecture: x64
|
||||
- os: macos-14
|
||||
architecture: aarch64
|
||||
- os: ubuntu-22.04
|
||||
|
||||
name: "Photonlib - Build Examples - ${{ matrix.os }}"
|
||||
runs-on: ${{ matrix.os }}
|
||||
|
||||
steps:
|
||||
- name: Checkout code
|
||||
uses: actions/checkout@v4
|
||||
@@ -44,24 +62,17 @@ jobs:
|
||||
with:
|
||||
java-version: 17
|
||||
distribution: temurin
|
||||
- name: Install RoboRIO Toolchain
|
||||
run: ./gradlew installRoboRioToolchain
|
||||
# Need to publish to maven local first, so that C++ sim can pick it up
|
||||
# Still haven't figured out how to make the vendordep file be copied before trying to build examples
|
||||
- name: Publish photonlib to maven local
|
||||
run: |
|
||||
chmod +x gradlew
|
||||
./gradlew publishtomavenlocal -x check
|
||||
run: ./gradlew photon-targeting:publishtomavenlocal photon-lib:publishtomavenlocal -x check
|
||||
- name: Build Java examples
|
||||
working-directory: photonlib-java-examples
|
||||
run: |
|
||||
chmod +x gradlew
|
||||
./gradlew copyPhotonlib -x check
|
||||
./gradlew build -x check --max-workers 2
|
||||
run: ./gradlew build
|
||||
- name: Build C++ examples
|
||||
working-directory: photonlib-cpp-examples
|
||||
run: |
|
||||
chmod +x gradlew
|
||||
./gradlew copyPhotonlib -x check
|
||||
./gradlew build -x check --max-workers 2
|
||||
run: ./gradlew build
|
||||
build-gradle:
|
||||
name: "Gradle Build"
|
||||
runs-on: ubuntu-22.04
|
||||
@@ -74,26 +85,24 @@ jobs:
|
||||
- name: Fetch tags
|
||||
run: git fetch --tags --force
|
||||
- name: Install Java 17
|
||||
uses: actions/setup-java@v3
|
||||
uses: actions/setup-java@v4
|
||||
with:
|
||||
java-version: 17
|
||||
distribution: temurin
|
||||
- name: Install mrcal deps
|
||||
run: sudo apt-get update && sudo apt-get install -y libcholmod3 liblapack3 libsuitesparseconfig5
|
||||
- name: Gradle Build
|
||||
run: |
|
||||
chmod +x gradlew
|
||||
./gradlew build -x check --max-workers 2
|
||||
run: ./gradlew photon-targeting:build photon-core:build photon-server:build -x check
|
||||
- name: Gradle Tests
|
||||
run: ./gradlew testHeadless -i --max-workers 1 --stacktrace
|
||||
run: ./gradlew testHeadless -i --stacktrace
|
||||
- name: Gradle Coverage
|
||||
run: ./gradlew jacocoTestReport --max-workers 1
|
||||
run: ./gradlew jacocoTestReport
|
||||
- name: Publish Coverage Report
|
||||
uses: codecov/codecov-action@v3
|
||||
uses: codecov/codecov-action@v4
|
||||
with:
|
||||
file: ./photon-server/build/reports/jacoco/test/jacocoTestReport.xml
|
||||
- name: Publish Core Coverage Report
|
||||
uses: codecov/codecov-action@v3
|
||||
uses: codecov/codecov-action@v4
|
||||
with:
|
||||
file: ./photon-core/build/reports/jacoco/test/jacocoTestReport.xml
|
||||
build-offline-docs:
|
||||
@@ -101,27 +110,60 @@ jobs:
|
||||
runs-on: ubuntu-22.04
|
||||
steps:
|
||||
- uses: actions/checkout@v4
|
||||
with:
|
||||
repository: 'PhotonVision/photonvision-docs.git'
|
||||
ref: master
|
||||
- uses: actions/setup-python@v5
|
||||
with:
|
||||
python-version: '3.9'
|
||||
python-version: '3.11'
|
||||
- name: Install graphviz
|
||||
run: |
|
||||
sudo apt-get update
|
||||
sudo apt-get -y install graphviz
|
||||
- name: Install dependencies
|
||||
working-directory: docs
|
||||
run: |
|
||||
python -m pip install --upgrade pip
|
||||
pip install sphinx sphinx_rtd_theme sphinx-tabs sphinxext-opengraph doc8
|
||||
pip install -r requirements.txt
|
||||
- name: Build the docs
|
||||
working-directory: docs
|
||||
run: |
|
||||
make html
|
||||
- uses: actions/upload-artifact@master
|
||||
- uses: actions/upload-artifact@v4
|
||||
with:
|
||||
name: built-docs
|
||||
path: build/html
|
||||
path: docs/build/html
|
||||
|
||||
build-photonlib-vendorjson:
|
||||
name: "Build Vendor JSON"
|
||||
runs-on: ubuntu-22.04
|
||||
steps:
|
||||
- uses: actions/checkout@v4
|
||||
with:
|
||||
fetch-depth: 0
|
||||
|
||||
- name: Install Java 17
|
||||
uses: actions/setup-java@v4
|
||||
with:
|
||||
java-version: 17
|
||||
distribution: temurin
|
||||
|
||||
# grab all tags
|
||||
- run: git fetch --tags --force
|
||||
|
||||
# Generate the JSON and give it the ""standard""" name maven gives it
|
||||
- run: |
|
||||
./gradlew photon-lib:generateVendorJson
|
||||
export VERSION=$(git describe --tags --match=v*)
|
||||
mv photon-lib/build/generated/vendordeps/photonlib.json photon-lib/build/generated/vendordeps/photonlib-$(git describe --tags --match=v*).json
|
||||
|
||||
# Upload it here so it shows up in releases
|
||||
- uses: actions/upload-artifact@v4
|
||||
with:
|
||||
name: photonlib-vendor-json
|
||||
path: photon-lib/build/generated/vendordeps/photonlib-*.json
|
||||
|
||||
build-photonlib-host:
|
||||
env:
|
||||
MACOSX_DEPLOYMENT_TARGET: 12
|
||||
MACOSX_DEPLOYMENT_TARGET: 13
|
||||
strategy:
|
||||
fail-fast: false
|
||||
matrix:
|
||||
@@ -129,9 +171,9 @@ jobs:
|
||||
- os: windows-2022
|
||||
artifact-name: Win64
|
||||
architecture: x64
|
||||
- os: macos-12
|
||||
- os: macos-14
|
||||
artifact-name: macOS
|
||||
architecture: x64
|
||||
architecture: aarch64
|
||||
- os: ubuntu-22.04
|
||||
artifact-name: Linux
|
||||
|
||||
@@ -146,26 +188,36 @@ jobs:
|
||||
with:
|
||||
java-version: 17
|
||||
distribution: temurin
|
||||
architecture: ${{ matrix.architecture }}
|
||||
- run: git fetch --tags --force
|
||||
- run: |
|
||||
chmod +x gradlew
|
||||
./gradlew photon-lib:build --max-workers 1
|
||||
- run: ./gradlew photon-targeting:build photon-lib:build -i
|
||||
name: Build with Gradle
|
||||
- run: ./gradlew photon-lib:publish photon-targeting:publish
|
||||
name: Publish
|
||||
env:
|
||||
ARTIFACTORY_API_KEY: ${{ secrets.ARTIFACTORY_API_KEY }}
|
||||
if: github.event_name == 'push'
|
||||
if: github.event_name == 'push' && github.repository_owner == 'photonvision'
|
||||
# Copy artifacts to build/outputs/maven
|
||||
- run: ./gradlew photon-lib:publish photon-targeting:publish -PcopyOfflineArtifacts
|
||||
- uses: actions/upload-artifact@v4
|
||||
with:
|
||||
name: maven-${{ matrix.artifact-name }}
|
||||
path: build/outputs
|
||||
|
||||
build-photonlib-docker:
|
||||
strategy:
|
||||
fail-fast: false
|
||||
matrix:
|
||||
include:
|
||||
- container: wpilib/roborio-cross-ubuntu:2024-22.04
|
||||
- container: wpilib/roborio-cross-ubuntu:2025-24.04
|
||||
artifact-name: Athena
|
||||
build-options: "-Ponlylinuxathena"
|
||||
- container: wpilib/raspbian-cross-ubuntu:bullseye-22.04
|
||||
artifact-name: Raspbian
|
||||
build-options: "-Ponlylinuxarm32"
|
||||
- container: wpilib/aarch64-cross-ubuntu:bullseye-22.04
|
||||
artifact-name: Aarch64
|
||||
build-options: "-Ponlylinuxarm64"
|
||||
|
||||
runs-on: ubuntu-22.04
|
||||
container: ${{ matrix.container }}
|
||||
@@ -178,16 +230,45 @@ jobs:
|
||||
run: |
|
||||
git config --global --add safe.directory /__w/photonvision/photonvision
|
||||
- name: Build PhotonLib
|
||||
run: |
|
||||
chmod +x gradlew
|
||||
./gradlew photon-lib:build --max-workers 1
|
||||
# We don't need to run tests, since we specify only non-native platforms
|
||||
run: ./gradlew photon-targeting:build photon-lib:build ${{ matrix.build-options }} -i -x test
|
||||
- name: Publish
|
||||
run: |
|
||||
chmod +x gradlew
|
||||
./gradlew photon-lib:publish photon-targeting:publish
|
||||
run: ./gradlew photon-lib:publish photon-targeting:publish ${{ matrix.build-options }}
|
||||
env:
|
||||
ARTIFACTORY_API_KEY: ${{ secrets.ARTIFACTORY_API_KEY }}
|
||||
if: github.event_name == 'push'
|
||||
if: github.event_name == 'push' && github.repository_owner == 'photonvision'
|
||||
# Copy artifacts to build/outputs/maven
|
||||
- run: ./gradlew photon-lib:publish photon-targeting:publish -PcopyOfflineArtifacts ${{ matrix.build-options }}
|
||||
- uses: actions/upload-artifact@v4
|
||||
with:
|
||||
name: maven-${{ matrix.artifact-name }}
|
||||
path: build/outputs
|
||||
|
||||
combine:
|
||||
name: Combine
|
||||
needs: [build-photonlib-docker, build-photonlib-host]
|
||||
runs-on: ubuntu-22.04
|
||||
steps:
|
||||
- uses: actions/checkout@v4
|
||||
with:
|
||||
fetch-depth: 0
|
||||
- run: git fetch --tags --force
|
||||
# download all maven-* artifacts to outputs/
|
||||
- uses: actions/download-artifact@v4
|
||||
with:
|
||||
merge-multiple: true
|
||||
path: output
|
||||
pattern: maven-*
|
||||
- run: find .
|
||||
- run: zip -r photonlib-$(git describe --tags --match=v*).zip .
|
||||
name: ZIP stuff up
|
||||
working-directory: output
|
||||
- run: ls output
|
||||
- uses: actions/upload-artifact@v4
|
||||
with:
|
||||
name: photonlib-offline
|
||||
path: output/*.zip
|
||||
|
||||
build-package:
|
||||
needs: [build-client, build-gradle, build-offline-docs]
|
||||
|
||||
@@ -198,24 +279,20 @@ jobs:
|
||||
- os: windows-latest
|
||||
artifact-name: Win64
|
||||
architecture: x64
|
||||
arch-override: none
|
||||
arch-override: winx64
|
||||
- os: macos-latest
|
||||
artifact-name: macOS
|
||||
architecture: x64
|
||||
arch-override: none
|
||||
- os: ubuntu-latest
|
||||
artifact-name: Linux
|
||||
architecture: x64
|
||||
arch-override: none
|
||||
arch-override: macx64
|
||||
- os: macos-latest
|
||||
artifact-name: macOSArm
|
||||
architecture: x64
|
||||
arch-override: macarm64
|
||||
- os: ubuntu-latest
|
||||
artifact-name: LinuxArm32
|
||||
- os: ubuntu-22.04
|
||||
artifact-name: Linux
|
||||
architecture: x64
|
||||
arch-override: linuxarm32
|
||||
- os: ubuntu-latest
|
||||
arch-override: linuxx64
|
||||
- os: ubuntu-22.04
|
||||
artifact-name: LinuxArm64
|
||||
architecture: x64
|
||||
arch-override: linuxarm64
|
||||
@@ -232,6 +309,10 @@ jobs:
|
||||
with:
|
||||
java-version: 17
|
||||
distribution: temurin
|
||||
architecture: ${{ matrix.architecture }}
|
||||
- name: Install Arm64 Toolchain
|
||||
run: ./gradlew installArm64Toolchain
|
||||
if: ${{ (matrix.artifact-name) == 'LinuxArm64' }}
|
||||
- run: |
|
||||
rm -rf photon-server/src/main/resources/web/*
|
||||
mkdir -p photon-server/src/main/resources/web/docs
|
||||
@@ -248,18 +329,95 @@ jobs:
|
||||
with:
|
||||
name: built-docs
|
||||
path: photon-server/src/main/resources/web/docs
|
||||
- run: |
|
||||
chmod +x gradlew
|
||||
./gradlew photon-server:shadowJar --max-workers 2 -PArchOverride=${{ matrix.arch-override }}
|
||||
- run: ./gradlew photon-targeting:jar photon-server:shadowJar -PArchOverride=${{ matrix.arch-override }}
|
||||
if: ${{ (matrix.arch-override != 'none') }}
|
||||
- run: |
|
||||
chmod +x gradlew
|
||||
./gradlew photon-server:shadowJar --max-workers 2
|
||||
- run: ./gradlew photon-server:shadowJar
|
||||
if: ${{ (matrix.arch-override == 'none') }}
|
||||
- uses: actions/upload-artifact@v4
|
||||
with:
|
||||
name: jar-${{ matrix.artifact-name }}
|
||||
path: photon-server/build/libs
|
||||
- uses: actions/upload-artifact@v4
|
||||
with:
|
||||
name: photon-targeting_jar-${{ matrix.artifact-name }}
|
||||
path: photon-targeting/build/libs
|
||||
|
||||
run-smoketest-native:
|
||||
needs: [build-package]
|
||||
|
||||
strategy:
|
||||
fail-fast: false
|
||||
matrix:
|
||||
include:
|
||||
- os: ubuntu-22.04
|
||||
artifact-name: jar-Linux
|
||||
extraOpts: -Djdk.lang.Process.launchMechanism=vfork
|
||||
- os: windows-latest
|
||||
artifact-name: jar-Win64
|
||||
extraOpts: ""
|
||||
- os: macos-latest
|
||||
artifact-name: jar-macOS
|
||||
architecture: x64
|
||||
|
||||
runs-on: ${{ matrix.os }}
|
||||
|
||||
steps:
|
||||
- name: Install Java 17
|
||||
uses: actions/setup-java@v4
|
||||
with:
|
||||
java-version: 17
|
||||
distribution: temurin
|
||||
- uses: actions/download-artifact@v4
|
||||
with:
|
||||
name: ${{ matrix.artifact-name }}
|
||||
# On linux, install mrcal packages
|
||||
- run: |
|
||||
sudo apt-get update
|
||||
sudo apt-get install --yes libcholmod3 liblapack3 libsuitesparseconfig5
|
||||
if: ${{ (matrix.os) == 'ubuntu-22.04' }}
|
||||
# and actually run the jar
|
||||
- run: java -jar ${{ matrix.extraOpts }} *.jar --smoketest
|
||||
if: ${{ (matrix.os) != 'windows-latest' }}
|
||||
- run: ls *.jar | %{ Write-Host "Running $($_.Name)"; Start-Process "java" -ArgumentList "-jar `"$($_.FullName)`" --smoketest" -NoNewWindow -Wait; break }
|
||||
if: ${{ (matrix.os) == 'windows-latest' }}
|
||||
|
||||
run-smoketest-chroot:
|
||||
needs: [build-package]
|
||||
|
||||
strategy:
|
||||
fail-fast: false
|
||||
matrix:
|
||||
include:
|
||||
- os: ubuntu-22.04
|
||||
artifact-name: LinuxArm64
|
||||
image_suffix: RaspberryPi
|
||||
image_url: https://github.com/PhotonVision/photon-image-modifier/releases/download/v2025.0.3/photonvision_raspi.img.xz
|
||||
cpu: cortex-a7
|
||||
image_additional_mb: 0
|
||||
extraOpts: -Djdk.lang.Process.launchMechanism=vfork
|
||||
|
||||
runs-on: ${{ matrix.os }}
|
||||
name: smoketest-${{ matrix.image_suffix }}
|
||||
|
||||
steps:
|
||||
- uses: actions/download-artifact@v4
|
||||
with:
|
||||
name: jar-${{ matrix.artifact-name }}
|
||||
|
||||
- uses: pguyot/arm-runner-action@v2
|
||||
name: Run photon smoketest
|
||||
id: generate_image
|
||||
with:
|
||||
base_image: ${{ matrix.image_url }}
|
||||
image_additional_mb: ${{ matrix.image_additional_mb }}
|
||||
optimize_image: yes
|
||||
cpu: ${{ matrix.cpu }}
|
||||
# We do _not_ wanna copy photon into the image. Bind mount instead
|
||||
bind_mount_repository: true
|
||||
# our image better have java installed already
|
||||
commands: |
|
||||
java -jar ${{ matrix.extraOpts }} *.jar --smoketest
|
||||
|
||||
build-image:
|
||||
needs: [build-package]
|
||||
|
||||
@@ -269,36 +427,66 @@ jobs:
|
||||
fail-fast: false
|
||||
matrix:
|
||||
include:
|
||||
- os: ubuntu-latest
|
||||
- os: ubuntu-22.04
|
||||
artifact-name: LinuxArm64
|
||||
image_suffix: RaspberryPi
|
||||
image_url: https://github.com/PhotonVision/photon-image-modifier/releases/download/v2024.0.4/photonvision_raspi.img.xz
|
||||
image_url: https://github.com/PhotonVision/photon-image-modifier/releases/download/v2025.0.3/photonvision_raspi.img.xz
|
||||
cpu: cortex-a7
|
||||
image_additional_mb: 0
|
||||
- os: ubuntu-latest
|
||||
- os: ubuntu-22.04
|
||||
artifact-name: LinuxArm64
|
||||
image_suffix: limelight2
|
||||
image_url: https://github.com/PhotonVision/photon-image-modifier/releases/download/v2024.0.4/photonvision_limelight.img.xz
|
||||
image_url: https://github.com/PhotonVision/photon-image-modifier/releases/download/v2025.0.3/photonvision_limelight.img.xz
|
||||
cpu: cortex-a7
|
||||
image_additional_mb: 0
|
||||
- os: ubuntu-latest
|
||||
- os: ubuntu-22.04
|
||||
artifact-name: LinuxArm64
|
||||
image_suffix: limelight3
|
||||
image_url: https://github.com/PhotonVision/photon-image-modifier/releases/download/v2024.0.5/photonvision_limelight3.img.xz
|
||||
image_url: https://github.com/PhotonVision/photon-image-modifier/releases/download/v2025.0.3/photonvision_limelight3.img.xz
|
||||
cpu: cortex-a7
|
||||
image_additional_mb: 0
|
||||
- os: ubuntu-latest
|
||||
- os: ubuntu-22.04
|
||||
artifact-name: LinuxArm64
|
||||
image_suffix: limelight3G
|
||||
image_url: https://github.com/PhotonVision/photon-image-modifier/releases/download/v2025.0.3/photonvision_limelight3g.img.xz
|
||||
cpu: cortex-a7
|
||||
image_additional_mb: 0
|
||||
- os: ubuntu-22.04
|
||||
artifact-name: LinuxArm64
|
||||
image_suffix: orangepi5
|
||||
image_url: https://github.com/PhotonVision/photon-image-modifier/releases/download/v2024.0.6/photonvision_opi5.img.xz
|
||||
image_url: https://github.com/PhotonVision/photon-image-modifier/releases/download/v2025.0.3/photonvision_opi5.img.xz
|
||||
cpu: cortex-a8
|
||||
image_additional_mb: 4096
|
||||
- os: ubuntu-latest
|
||||
image_additional_mb: 1024
|
||||
- os: ubuntu-22.04
|
||||
artifact-name: LinuxArm64
|
||||
image_suffix: orangepi5b
|
||||
image_url: https://github.com/PhotonVision/photon-image-modifier/releases/download/v2025.0.3/photonvision_opi5b.img.xz
|
||||
cpu: cortex-a8
|
||||
image_additional_mb: 1024
|
||||
- os: ubuntu-22.04
|
||||
artifact-name: LinuxArm64
|
||||
image_suffix: orangepi5plus
|
||||
image_url: https://github.com/PhotonVision/photon-image-modifier/releases/download/v2024.0.6/photonvision_opi5plus.img.xz
|
||||
image_url: https://github.com/PhotonVision/photon-image-modifier/releases/download/v2025.0.3/photonvision_opi5plus.img.xz
|
||||
cpu: cortex-a8
|
||||
image_additional_mb: 4096
|
||||
image_additional_mb: 1024
|
||||
- os: ubuntu-22.04
|
||||
artifact-name: LinuxArm64
|
||||
image_suffix: orangepi5pro
|
||||
image_url: https://github.com/PhotonVision/photon-image-modifier/releases/download/v2025.0.3/photonvision_opi5pro.img.xz
|
||||
cpu: cortex-a8
|
||||
image_additional_mb: 1024
|
||||
- os: ubuntu-22.04
|
||||
artifact-name: LinuxArm64
|
||||
image_suffix: orangepi5max
|
||||
image_url: https://github.com/PhotonVision/photon-image-modifier/releases/download/v2025.0.3/photonvision_opi5max.img.xz
|
||||
cpu: cortex-a8
|
||||
image_additional_mb: 1024
|
||||
- os: ubuntu-22.04
|
||||
artifact-name: LinuxArm64
|
||||
image_suffix: rock5c
|
||||
image_url: https://github.com/PhotonVision/photon-image-modifier/releases/download/v2025.0.3/photonvision_rock5c.img.xz
|
||||
cpu: cortex-a8
|
||||
image_additional_mb: 1024
|
||||
|
||||
runs-on: ${{ matrix.os }}
|
||||
name: "Build image - ${{ matrix.image_url }}"
|
||||
@@ -311,7 +499,7 @@ jobs:
|
||||
- uses: actions/download-artifact@v4
|
||||
with:
|
||||
name: jar-${{ matrix.artifact-name }}
|
||||
- uses: pguyot/arm-runner-action@v2
|
||||
- uses: pguyot/arm-runner-action@HEAD
|
||||
name: Generate image
|
||||
id: generate_image
|
||||
with:
|
||||
@@ -336,12 +524,30 @@ jobs:
|
||||
name: image-${{ matrix.image_suffix }}
|
||||
path: photonvision*.xz
|
||||
release:
|
||||
needs: [build-package, build-image]
|
||||
needs: [build-package, build-image, combine]
|
||||
runs-on: ubuntu-22.04
|
||||
steps:
|
||||
# Download literally every single artifact. This also downloads client and docs,
|
||||
# but the filtering below won't pick these up (I hope)
|
||||
# Download all fat JARs
|
||||
- uses: actions/download-artifact@v4
|
||||
with:
|
||||
merge-multiple: true
|
||||
pattern: jar-*
|
||||
# Download offline photonlib
|
||||
- uses: actions/download-artifact@v4
|
||||
with:
|
||||
merge-multiple: true
|
||||
pattern: photonlib-offline
|
||||
# Download vendor json
|
||||
- uses: actions/download-artifact@v4
|
||||
with:
|
||||
merge-multiple: true
|
||||
pattern: photonlib-vendor-json
|
||||
# Download all images
|
||||
- uses: actions/download-artifact@v4
|
||||
with:
|
||||
merge-multiple: true
|
||||
pattern: image-*
|
||||
|
||||
- run: find
|
||||
# Push to dev release
|
||||
- uses: pyTooling/Actions/releaser@r0
|
||||
@@ -353,14 +559,40 @@ jobs:
|
||||
**/*.xz
|
||||
**/*.jar
|
||||
**/photonlib*.json
|
||||
**/photonlib*.zip
|
||||
if: github.event_name == 'push'
|
||||
# Upload all jars and xz archives
|
||||
- uses: softprops/action-gh-release@v1
|
||||
# Split into two uploads to work around max size limits in action-gh-releases
|
||||
# https://github.com/softprops/action-gh-release/issues/353
|
||||
- uses: softprops/action-gh-release@v2.0.9
|
||||
with:
|
||||
files: |
|
||||
**/*.xz
|
||||
**/*.jar
|
||||
**/photonlib*.json
|
||||
**/@(*orangepi5*|*rock5*).xz
|
||||
if: startsWith(github.ref, 'refs/tags/v')
|
||||
env:
|
||||
GITHUB_TOKEN: ${{ secrets.GITHUB_TOKEN }}
|
||||
- uses: softprops/action-gh-release@v2.0.9
|
||||
with:
|
||||
files: |
|
||||
**/!(*orangepi5*|*rock5*).xz
|
||||
**/*.jar
|
||||
**/photonlib*.json
|
||||
**/photonlib*.zip
|
||||
if: startsWith(github.ref, 'refs/tags/v')
|
||||
env:
|
||||
GITHUB_TOKEN: ${{ secrets.GITHUB_TOKEN }}
|
||||
|
||||
dispatch:
|
||||
name: dispatch
|
||||
needs: [build-photonlib-vendorjson, release]
|
||||
runs-on: ubuntu-22.04
|
||||
steps:
|
||||
- uses: peter-evans/repository-dispatch@v3
|
||||
if: |
|
||||
github.repository == 'PhotonVision/photonvision' &&
|
||||
startsWith(github.ref, 'refs/tags/v')
|
||||
with:
|
||||
token: ${{ secrets.VENDOR_JSON_REPO_PUSH_TOKEN }}
|
||||
repository: PhotonVision/vendor-json-repo
|
||||
event-type: tag
|
||||
client-payload: '{"run_id": "${{ github.run_id }}", "package_version": "${{ github.ref_name }}"}'
|
||||
|
||||
17
.github/workflows/cut-new-tag.yml
vendored
Normal file
@@ -0,0 +1,17 @@
|
||||
name: Cut a new tag
|
||||
|
||||
on:
|
||||
workflow_dispatch:
|
||||
inputs:
|
||||
tag_name:
|
||||
type: string
|
||||
description: The full name of the new tag to push to the latest commit to main
|
||||
|
||||
jobs:
|
||||
push_tag:
|
||||
runs-on: ubuntu-latest
|
||||
|
||||
steps:
|
||||
- uses: actions/checkout@v4
|
||||
- run: git tag ${{ github.event.inputs.tag_name }}
|
||||
- run: git push origin ${{ github.event.inputs.tag_name }}
|
||||
35
.github/workflows/lint-format.yml
vendored
@@ -1,12 +1,14 @@
|
||||
name: Lint and Format
|
||||
|
||||
on:
|
||||
# Run on pushes to main and pushed tags, and on pull requests against main, but ignore the docs folder
|
||||
push:
|
||||
branches: [ master ]
|
||||
branches: [ main ]
|
||||
tags:
|
||||
- 'v*'
|
||||
pull_request:
|
||||
branches: [ master ]
|
||||
branches: [ main ]
|
||||
merge_group:
|
||||
|
||||
concurrency:
|
||||
group: ${{ github.workflow }}-${{ github.head_ref || github.ref }}
|
||||
@@ -17,18 +19,18 @@ jobs:
|
||||
name: "wpiformat"
|
||||
runs-on: ubuntu-22.04
|
||||
steps:
|
||||
- uses: actions/checkout@v3
|
||||
- uses: actions/checkout@v4
|
||||
- name: Fetch all history and metadata
|
||||
run: |
|
||||
git fetch --prune --unshallow
|
||||
git checkout -b pr
|
||||
git branch -f master origin/master
|
||||
git branch -f main origin/main
|
||||
- name: Set up Python 3.8
|
||||
uses: actions/setup-python@v4
|
||||
with:
|
||||
python-version: 3.8
|
||||
python-version: 3.11
|
||||
- name: Install wpiformat
|
||||
run: pip3 install wpiformat
|
||||
run: pip3 install wpiformat==2024.45
|
||||
- name: Run
|
||||
run: wpiformat
|
||||
- name: Check output
|
||||
@@ -36,7 +38,7 @@ jobs:
|
||||
- name: Generate diff
|
||||
run: git diff HEAD > wpiformat-fixes.patch
|
||||
if: ${{ failure() }}
|
||||
- uses: actions/upload-artifact@v3
|
||||
- uses: actions/upload-artifact@v4
|
||||
with:
|
||||
name: wpiformat fixes
|
||||
path: wpiformat-fixes.patch
|
||||
@@ -45,16 +47,15 @@ jobs:
|
||||
name: "Java Formatting"
|
||||
runs-on: ubuntu-22.04
|
||||
steps:
|
||||
- uses: actions/checkout@v3
|
||||
- uses: actions/checkout@v4
|
||||
with:
|
||||
fetch-depth: 0
|
||||
- uses: actions/setup-java@v3
|
||||
- uses: actions/setup-java@v4
|
||||
with:
|
||||
java-version: 17
|
||||
distribution: temurin
|
||||
- run: |
|
||||
chmod +x gradlew
|
||||
./gradlew spotlessCheck
|
||||
- run: ./gradlew spotlessCheck
|
||||
name: Run spotless
|
||||
|
||||
client-lint-format:
|
||||
name: "PhotonClient Lint and Formatting"
|
||||
@@ -63,9 +64,9 @@ jobs:
|
||||
working-directory: photon-client
|
||||
runs-on: ubuntu-22.04
|
||||
steps:
|
||||
- uses: actions/checkout@v3
|
||||
- uses: actions/checkout@v4
|
||||
- name: Setup Node.js
|
||||
uses: actions/setup-node@v3
|
||||
uses: actions/setup-node@v4
|
||||
with:
|
||||
node-version: 18
|
||||
- name: Install Dependencies
|
||||
@@ -78,11 +79,11 @@ jobs:
|
||||
name: "Check server index.html not changed"
|
||||
runs-on: ubuntu-22.04
|
||||
steps:
|
||||
- uses: actions/checkout@v3
|
||||
- uses: actions/checkout@v4
|
||||
- name: Fetch all history and metadata
|
||||
run: |
|
||||
git fetch --prune --unshallow
|
||||
git checkout -b pr
|
||||
git branch -f master origin/master
|
||||
git branch -f main origin/main
|
||||
- name: Check index.html not changed
|
||||
run: git --no-pager diff --exit-code origin/master photon-server/src/main/resources/web/index.html
|
||||
run: git --no-pager diff --exit-code origin/main photon-server/src/main/resources/web/index.html
|
||||
|
||||
@@ -1,12 +1,18 @@
|
||||
name: Documentation
|
||||
name: Photon Code Documentation
|
||||
|
||||
on:
|
||||
# Run on pushes to main and pushed tags, and on pull requests against main, but ignore the docs folder
|
||||
push:
|
||||
# For now, run on all commits to master
|
||||
branches: [ master ]
|
||||
# and also all tags starting with v
|
||||
branches: [ main ]
|
||||
tags:
|
||||
- 'v*'
|
||||
pull_request:
|
||||
branches: [ main ]
|
||||
merge_group:
|
||||
|
||||
concurrency:
|
||||
group: ${{ github.workflow }}-${{ github.head_ref || github.ref }}
|
||||
cancel-in-progress: true
|
||||
|
||||
# Sets permissions of the GITHUB_TOKEN to allow deployment to GitHub Pages
|
||||
permissions:
|
||||
@@ -14,10 +20,6 @@ permissions:
|
||||
pages: write
|
||||
id-token: write
|
||||
|
||||
concurrency:
|
||||
group: ${{ github.workflow }}-${{ github.ref }}
|
||||
cancel-in-progress: true
|
||||
|
||||
jobs:
|
||||
build-client:
|
||||
name: "PhotonClient Build"
|
||||
@@ -50,7 +52,7 @@ jobs:
|
||||
- name: Fetch tags
|
||||
run: git fetch --tags --force
|
||||
- name: Install Java 17
|
||||
uses: actions/setup-java@v3
|
||||
uses: actions/setup-java@v4
|
||||
with:
|
||||
java-version: 17
|
||||
distribution: temurin
|
||||
@@ -58,20 +60,16 @@ jobs:
|
||||
- name: Build javadocs/doxygen
|
||||
run: |
|
||||
chmod +x gradlew
|
||||
./gradlew docs:generateJavaDocs docs:doxygen
|
||||
./gradlew photon-docs:generateJavaDocs photon-docs:doxygen
|
||||
|
||||
- uses: actions/upload-artifact@v4
|
||||
with:
|
||||
name: built-docs
|
||||
path: docs/build/docs
|
||||
path: photon-docs/build/docs
|
||||
|
||||
release:
|
||||
needs: [build-client, run_docs]
|
||||
|
||||
environment:
|
||||
name: github-pages
|
||||
url: ${{ steps.deployment.outputs.page_url }}
|
||||
|
||||
runs-on: ubuntu-22.04
|
||||
steps:
|
||||
|
||||
@@ -79,14 +77,13 @@ jobs:
|
||||
- uses: actions/download-artifact@v4
|
||||
|
||||
- run: find .
|
||||
|
||||
- name: Setup Pages
|
||||
uses: actions/configure-pages@v4
|
||||
- name: Upload artifact
|
||||
uses: actions/upload-pages-artifact@v3
|
||||
- name: copy file via ssh password
|
||||
if: github.ref == 'refs/heads/main'
|
||||
uses: appleboy/scp-action@v0.1.7
|
||||
with:
|
||||
# Upload entire repository
|
||||
path: '.'
|
||||
- name: Deploy to GitHub Pages
|
||||
id: deployment
|
||||
uses: actions/deploy-pages@v4
|
||||
host: ${{ secrets.WEBMASTER_SSH_HOST }}
|
||||
username: ${{ secrets.WEBMASTER_SSH_USERNAME }}
|
||||
password: ${{ secrets.WEBMASTER_SSH_KEY }}
|
||||
port: ${{ secrets.WEBMASTER_SSH_PORT }}
|
||||
source: "*"
|
||||
target: /var/www/html/photonvision-docs/
|
||||
53
.github/workflows/photonvision-docs.yml
vendored
Normal file
@@ -0,0 +1,53 @@
|
||||
name: PhotonVision Sphinx Documentation Checks
|
||||
|
||||
on:
|
||||
push:
|
||||
branches: [ main ]
|
||||
pull_request:
|
||||
branches: [ main ]
|
||||
merge_group:
|
||||
|
||||
concurrency:
|
||||
group: ${{ github.workflow }}-${{ github.head_ref || github.ref }}
|
||||
cancel-in-progress: true
|
||||
|
||||
env:
|
||||
GITHUB_TOKEN: ${{ secrets.GITHUB_TOKEN }}
|
||||
|
||||
jobs:
|
||||
build:
|
||||
runs-on: ubuntu-22.04
|
||||
|
||||
steps:
|
||||
- uses: actions/checkout@v4
|
||||
|
||||
- uses: actions/setup-python@v4
|
||||
with:
|
||||
python-version: '3.11'
|
||||
|
||||
- name: Install and upgrade pip
|
||||
run: python -m pip install --upgrade pip
|
||||
|
||||
- name: Install graphviz
|
||||
run: |
|
||||
sudo apt-get update
|
||||
sudo apt-get -y install graphviz
|
||||
|
||||
- name: Install Python dependencies
|
||||
working-directory: docs
|
||||
run: |
|
||||
pip install sphinx sphinx_rtd_theme sphinx-tabs sphinxext-opengraph doc8
|
||||
pip install -r requirements.txt
|
||||
|
||||
- name: Check links
|
||||
working-directory: docs
|
||||
run: make linkcheck
|
||||
continue-on-error: true
|
||||
|
||||
- name: Check lint
|
||||
working-directory: docs
|
||||
run: make lint
|
||||
|
||||
- name: Compile HTML
|
||||
working-directory: docs
|
||||
run: make html
|
||||
20
.github/workflows/python.yml
vendored
@@ -5,15 +5,20 @@ permissions:
|
||||
|
||||
on:
|
||||
push:
|
||||
branches: [ master ]
|
||||
branches: [ main ]
|
||||
tags:
|
||||
- 'v*'
|
||||
pull_request:
|
||||
branches: [ master ]
|
||||
branches: [ main ]
|
||||
merge_group:
|
||||
|
||||
concurrency:
|
||||
group: ${{ github.workflow }}-${{ github.head_ref || github.ref }}
|
||||
cancel-in-progress: true
|
||||
|
||||
jobs:
|
||||
buildAndDeploy:
|
||||
runs-on: ubuntu-latest
|
||||
runs-on: ubuntu-22.04
|
||||
|
||||
steps:
|
||||
- name: Checkout code
|
||||
@@ -29,7 +34,7 @@ jobs:
|
||||
- name: Install dependencies
|
||||
run: |
|
||||
python -m pip install --upgrade pip
|
||||
pip install setuptools wheel pytest
|
||||
pip install setuptools wheel pytest mypy
|
||||
|
||||
- name: Build wheel
|
||||
working-directory: ./photon-lib/py
|
||||
@@ -42,6 +47,13 @@ jobs:
|
||||
pip install --no-cache-dir dist/*.whl
|
||||
pytest
|
||||
|
||||
- name: Run mypy type checking
|
||||
uses: liskin/gh-problem-matcher-wrap@v3
|
||||
with:
|
||||
linters: mypy
|
||||
run: |
|
||||
mypy --show-column-numbers --config-file photon-lib/py/pyproject.toml photon-lib
|
||||
|
||||
|
||||
- name: Upload artifacts
|
||||
uses: actions/upload-artifact@master
|
||||
|
||||
24
.gitignore
vendored
@@ -131,27 +131,12 @@ New client/photon-client/*
|
||||
*.jfr
|
||||
.DS_Store
|
||||
# *.iml
|
||||
photon-server/build
|
||||
photon-server/photon-vision
|
||||
photon-server/src/main/resources/web
|
||||
photon-server/src/main/java/org/photonvision/PhotonVersion.java
|
||||
photon-server/src/main/generated/native/include/org_photonvision_raspi_PicamJNI.h
|
||||
*.bin
|
||||
.gradle
|
||||
.gradle/*
|
||||
photonvision_config
|
||||
build/spotlessJava
|
||||
build/*
|
||||
build
|
||||
photon-lib/src/main/java/org/photonvision/PhotonVersion.java
|
||||
photon-lib/bin/main/images/*
|
||||
/photonlib-java-examples/bin/
|
||||
photon-lib/src/generate/native/include/PhotonVersion.h
|
||||
.gitattributes
|
||||
lib/*
|
||||
photon-server/lib/libapriltag.so
|
||||
photon-server/bin/main/nativelibraries/apriltag/*
|
||||
photon-server/src/main/resources/nativelibraries/apriltag/*
|
||||
bin*/
|
||||
build*/
|
||||
|
||||
photonlib-java-examples/*/vendordeps/*
|
||||
photonlib-cpp-examples/*/vendordeps/*
|
||||
@@ -161,6 +146,7 @@ photonlib-cpp-examples/*/vendordeps/*
|
||||
photonlib-cpp-examples/*/networktables.json.bck
|
||||
photonlib-java-examples/*/networktables.json.bck
|
||||
*.sqlite
|
||||
photon-server/src/main/resources/web/index.html
|
||||
|
||||
photon-server/src/main/resources/web/*
|
||||
venv
|
||||
.venv/*
|
||||
.venv
|
||||
|
||||
30
.readthedocs.yaml
Normal file
@@ -0,0 +1,30 @@
|
||||
version: 2
|
||||
|
||||
sphinx:
|
||||
builder: html
|
||||
configuration: docs/source/conf.py
|
||||
fail_on_warning: true
|
||||
|
||||
build:
|
||||
os: ubuntu-22.04
|
||||
tools:
|
||||
python: "3.11"
|
||||
apt_packages:
|
||||
- graphviz
|
||||
jobs:
|
||||
post_checkout:
|
||||
# Cancel building pull requests when there aren't changed in the docs directory or YAML file.
|
||||
# You can add any other files or directories that you'd like here as well,
|
||||
# like your docs requirements file, or other files that will change your docs build.
|
||||
#
|
||||
# If there are no changes (git diff exits with 0) we force the command to return with 183.
|
||||
# This is a special exit code on Read the Docs that will cancel the build immediately.
|
||||
- |
|
||||
if [ "$READTHEDOCS_VERSION_TYPE" = "external" ] && git diff --quiet origin/master -- docs/ .readthedocs.yaml;
|
||||
then
|
||||
exit 183;
|
||||
fi
|
||||
|
||||
python:
|
||||
install:
|
||||
- requirements: docs/requirements.txt
|
||||
@@ -20,6 +20,8 @@ modifiableFileExclude {
|
||||
\.ico$
|
||||
\.rknn$
|
||||
gradlew
|
||||
photon-lib/py/photonlibpy/generated/
|
||||
photon-targeting/src/generated/
|
||||
}
|
||||
|
||||
includeProject {
|
||||
|
||||
101
README.md
@@ -1,10 +1,10 @@
|
||||
# Photon Vision
|
||||
# PhotonVision
|
||||
|
||||
[](https://github.com/PhotonVision/photonvision/actions?query=workflow%3ACI) [](https://codecov.io/gh/PhotonVision/photonvision) [](https://discord.gg/wYxTwym)
|
||||
[](https://github.com/PhotonVision/photonvision/actions?query=workflow%3ACI) [](https://codecov.io/gh/PhotonVision/photonvision) [](https://discord.gg/wYxTwym)
|
||||
|
||||
PhotonVision is the free, fast, and easy-to-use computer vision solution for the *FIRST* Robotics Competition. You can read an overview of our features [on our website](https://photonvision.org). You can find our comprehensive documentation [here](https://docs.photonvision.org).
|
||||
|
||||
A copy of the latest Raspberry Pi image is available [here](https://github.com/PhotonVision/photon-pi-gen/releases). A copy of the latest standalone JAR is available [here](https://github.com/PhotonVision/photonvision/releases). If you are a Gloworm user you can find the latest Gloworm image [here](https://github.com/gloworm-vision/pi-gen/releases).
|
||||
The latest release of platform-specific jars and images is found [here](https://github.com/PhotonVision/photonvision/releases).
|
||||
|
||||
If you are interested in contributing code or documentation to the project, please [read our getting started page for contributors](https://docs.photonvision.org/en/latest/docs/contributing/index.html) and **[join the Discord](https://discord.gg/wYxTwym) to introduce yourself!** We hope to provide a welcoming community to anyone who is interested in helping.
|
||||
|
||||
@@ -14,54 +14,40 @@ If you are interested in contributing code or documentation to the project, plea
|
||||
<img src="https://contrib.rocks/image?repo=PhotonVision/photonvision" />
|
||||
</a>
|
||||
|
||||
## Documentation
|
||||
|
||||
- Our main documentation page: [docs.photonvision.org](https://docs.photonvision.org)
|
||||
- Photon UI demo: [http://photonvision.global/](http://photonvision.global/) (or [manual link](https://photonvision.github.io/photonvision/built-client/))
|
||||
- Javadocs: [javadocs.photonvision.org](https://javadocs.photonvision.org) (or [manual link](https://photonvision.github.io/photonvision/built-docs/javadoc/))
|
||||
- C++ Doxygen [cppdocs.photonvision.org](https://cppdocs.photonvision.org) (or [manual link](https://photonvision.github.io/photonvision/built-docs/doxygen/html/))
|
||||
|
||||
## Building
|
||||
|
||||
Gradle is used for all C++ and Java code, and NPM is used for the web UI. Instructions to compile PhotonVision yourself can be found [in our docs](https://docs.photonvision.org/en/latest/docs/contributing/building-photon.html#compiling-instructions).
|
||||
|
||||
You can run one of the many built in examples straight from the command line, too! They contain a fully featured robot project, and some include simulation support. The projects can be found inside the [`photonlib-java-examples`](photonlib-java-examples) and [`photonlib-cpp-examples`](photonlib-cpp-examples) subdirectories, respectively. Instructions for running these examples directly from the repo are found [in the docs](https://docs.photonvision.org/en/latest/docs/contributing/building-photon.html#running-examples).
|
||||
|
||||
## Gradle Arguments
|
||||
|
||||
Note that these are case sensitive!
|
||||
|
||||
* `-PArchOverride=foobar`: builds for a target system other than your current architecture. Valid overrides are:
|
||||
* linuxathena
|
||||
* linuxarm32
|
||||
* `-PArchOverride=foobar`: builds for a target system other than your current architecture. [Valid overrides](https://github.com/wpilibsuite/wpilib-tool-plugin/blob/main/src/main/java/edu/wpi/first/tools/NativePlatforms.java) are:
|
||||
* winx32
|
||||
* winx64
|
||||
* winarm64
|
||||
* macx64
|
||||
* macarm64
|
||||
* linuxx64
|
||||
* linuxarm64
|
||||
* arm32
|
||||
* arm64
|
||||
* x86-64
|
||||
* x86
|
||||
- `-PtgtIp`: Specifies where `./gradlew deploy` should try to copy the fat JAR to
|
||||
* linuxathena
|
||||
- `-PtgtIP`: Specifies where `./gradlew deploy` should try to copy the fat JAR to
|
||||
- `-Pprofile`: enables JVM profiling
|
||||
|
||||
## Building
|
||||
|
||||
Gradle is used for all C++ and Java code, and NPM is used for the web UI. Instructions to compile PhotonVision yourself can be found [in our docs](https://docs.photonvision.org/en/latest/docs/contributing/photonvision/build-instructions.html?highlight=npm%20install#compiling-instructions).
|
||||
|
||||
You can run one of the many built in examples straight from the command line, too! They contain a fully featured robot project, and some include simulation support. The projects can be found inside the `photonlib-java-examples` and `photonlib-cpp-examples` subdirectories, respectively. The projects currently available include:
|
||||
|
||||
- photonlib-java-examples:
|
||||
- aimandrange:simulateJava
|
||||
- aimattarget:simulateJava
|
||||
- getinrange:simulateJava
|
||||
- simaimandrange:simulateJava
|
||||
- simposeest:simulateJava
|
||||
- photonlib-cpp-examples:
|
||||
- aimandrange:simulateNative
|
||||
- getinrange:simulateNative
|
||||
|
||||
To run them, use the commands listed below. Photonlib must first be published to your local maven repository, then the `copyPhotonlib` task will copy the generated vendordep json file into each example. After that, the simulateJava/simulateNative task can be used like a normal robot project. Robot simulation with attached debugger is technically possible by using simulateExternalJava and modifying the launch script it exports, though unsupported.
|
||||
|
||||
```
|
||||
~/photonvision$ ./gradlew publishToMavenLocal
|
||||
|
||||
~/photonvision$ cd photonlib-java-examples
|
||||
~/photonvision/photonlib-java-examples$ ./gradlew copyPhotonlib
|
||||
~/photonvision/photonlib-java-examples$ ./gradlew <example-name>:simulateJava
|
||||
|
||||
~/photonvision$ cd photonlib-cpp-examples
|
||||
~/photonvision/photonlib-cpp-examples$ ./gradlew copyPhotonlib
|
||||
~/photonvision/photonlib-cpp-examples$ ./gradlew <example-name>:simulateNative
|
||||
```
|
||||
If you're cross-compiling, you'll need the wpilib toolchain installed. This can be done via Gradle: for example `./gradlew installArm64Toolchain` or `./gradlew installRoboRioToolchain`
|
||||
|
||||
## Out-of-Source Dependencies
|
||||
|
||||
PhotonVision uses the following additonal out-of-source repositories for building code.
|
||||
PhotonVision uses the following additional out-of-source repositories for building code.
|
||||
|
||||
- Base system images for Raspberry Pi & Orange Pi: https://github.com/PhotonVision/photon-image-modifier
|
||||
- C++ driver for Raspberry Pi CSI cameras: https://github.com/PhotonVision/photon-libcamera-gl-driver
|
||||
@@ -69,12 +55,19 @@ PhotonVision uses the following additonal out-of-source repositories for buildin
|
||||
- Custom build of OpenCV with GStreamer/Protobuf/other custom flags: https://github.com/PhotonVision/thirdparty-opencv
|
||||
- JNI code for aruco-nano: https://github.com/PhotonVision/aruconano-jni
|
||||
|
||||
## Additional packages
|
||||
|
||||
For now, using mrcal requires installing these additional packages on Linux systems:
|
||||
|
||||
```
|
||||
sudo apt install libcholmod3 liblapack3 libsuitesparseconfig5
|
||||
```
|
||||
|
||||
## Acknowledgments
|
||||
|
||||
PhotonVision was forked from [Chameleon Vision](https://github.com/Chameleon-Vision/chameleon-vision/). Thank you to everyone who worked on the original project.
|
||||
|
||||
|
||||
* [WPILib](https://github.com/wpilibsuite) - Specifically [cscore](https://github.com/wpilibsuite/allwpilib/tree/master/cscore), [CameraServer](https://github.com/wpilibsuite/allwpilib/tree/master/cameraserver), [NTCore](https://github.com/wpilibsuite/allwpilib/tree/master/ntcore), and [OpenCV](https://github.com/wpilibsuite/thirdparty-opencv).
|
||||
* [WPILib](https://github.com/wpilibsuite) - Specifically [cscore](https://github.com/wpilibsuite/allwpilib/tree/main/cscore), [CameraServer](https://github.com/wpilibsuite/allwpilib/tree/main/cameraserver), [NTCore](https://github.com/wpilibsuite/allwpilib/tree/main/ntcore), and [OpenCV](https://github.com/wpilibsuite/thirdparty-opencv).
|
||||
|
||||
* [Apache Commons](https://commons.apache.org/) - Specifically [Commons Math](https://commons.apache.org/proper/commons-math/), and [Commons Lang](https://commons.apache.org/proper/commons-lang/)
|
||||
|
||||
@@ -85,25 +78,9 @@ PhotonVision was forked from [Chameleon Vision](https://github.com/Chameleon-Vis
|
||||
* [FasterXML](https://github.com/FasterXML) - Specifically [jackson](https://github.com/FasterXML/jackson)
|
||||
|
||||
## License
|
||||
PhotonVision is licensed under the [GNU General Public License](https://www.gnu.org/licenses/gpl-3.0.html)
|
||||
|
||||
PhotonVision is licensed under the [GNU General Public License](https://www.gnu.org/licenses/gpl-3.0.html).
|
||||
|
||||
## Meeting Notes
|
||||
Our meeting notes can be found in the wiki section of this repository.
|
||||
|
||||
* [2020 Meeting Notes](https://github.com/PhotonVision/photonvision/wiki/2020-Meeting-Notes)
|
||||
* [2021 Meeting Notes](https://github.com/PhotonVision/photonvision/wiki/2021-Meeting-Notes)
|
||||
|
||||
## Additional packages
|
||||
|
||||
For now, using mrcal requires installing these additional packages on Linux systems:
|
||||
|
||||
```
|
||||
sudo apt install libcholmod3 liblapack3 libsuitesparseconfig5
|
||||
```
|
||||
|
||||
## Documentation
|
||||
|
||||
- Our main documentation page: [docs.photonvision.org](https://docs.photonvision.org)
|
||||
- Photon UI demo: [demo.photonvision.org](https://demo.photonvision.org) (or [manual link](https://photonvision.github.io/photonvision/built-client/))
|
||||
- Javadocs: [javadocs.photonvision.org](https://javadocs.photonvision.org) (or [manual link](https://photonvision.github.io/photonvision/built-docs/javadoc/))
|
||||
- C++ Doxygen [cppdocs.photonvision.org](https://cppdocs.photonvision.org) (or [manual link](https://photonvision.github.io/photonvision/built-docs/doxygen/html/))
|
||||
Our [meeting notes](https://github.com/PhotonVision/photonvision/wiki/PhotonVision-Meeting-Notes) can be found in the wiki section of this repository.
|
||||
|
||||
66
build.gradle
@@ -1,38 +1,48 @@
|
||||
import edu.wpi.first.toolchain.*
|
||||
|
||||
plugins {
|
||||
id "cpp"
|
||||
id "com.diffplug.spotless" version "6.24.0"
|
||||
id "edu.wpi.first.NativeUtils" version "2024.6.1" apply false
|
||||
id "edu.wpi.first.wpilib.repositories.WPILibRepositoriesPlugin" version "2020.2"
|
||||
id "edu.wpi.first.GradleRIO" version "2024.2.1"
|
||||
id "edu.wpi.first.GradleRIO" version "2025.2.1"
|
||||
id 'edu.wpi.first.WpilibTools' version '1.3.0'
|
||||
id 'com.google.protobuf' version '0.9.4' apply false
|
||||
id 'com.google.protobuf' version '0.9.3' apply false
|
||||
id 'edu.wpi.first.GradleJni' version '1.1.0'
|
||||
id "org.ysb33r.doxygen" version "1.0.4" apply false
|
||||
id 'com.gradleup.shadow' version '8.3.4' apply false
|
||||
id "com.github.node-gradle.node" version "7.0.1" apply false
|
||||
id "org.hidetake.ssh" version "2.11.2" apply false
|
||||
}
|
||||
|
||||
allprojects {
|
||||
repositories {
|
||||
mavenCentral()
|
||||
mavenLocal()
|
||||
maven { url = "https://maven.photonvision.org/repository/internal/" }
|
||||
maven { url = "https://maven.photonvision.org/repository/snapshots/" }
|
||||
maven { url = "https://maven.photonvision.org/releases" }
|
||||
maven { url = "https://maven.photonvision.org/snapshots" }
|
||||
maven { url = "https://jogamp.org/deployment/maven/" }
|
||||
}
|
||||
wpilibRepositories.addAllReleaseRepositories(it)
|
||||
wpilibRepositories.addAllDevelopmentRepositories(it)
|
||||
}
|
||||
|
||||
ext.localMavenURL = file("$project.buildDir/outputs/maven")
|
||||
ext.allOutputsFolder = file("$project.buildDir/outputs")
|
||||
|
||||
// Configure the version number.
|
||||
apply from: "versioningHelper.gradle"
|
||||
|
||||
ext {
|
||||
wpilibVersion = "2024.2.1"
|
||||
wpilibVersion = "2025.2.1"
|
||||
wpimathVersion = wpilibVersion
|
||||
openCVversion = "4.8.0-2"
|
||||
joglVersion = "2.4.0-rc-20200307"
|
||||
openCVYear = "2025"
|
||||
openCVversion = "4.10.0-3"
|
||||
joglVersion = "2.4.0"
|
||||
javalinVersion = "5.6.2"
|
||||
photonGlDriverLibVersion = "dev-v2023.1.0-9-g75fc678"
|
||||
rknnVersion = "dev-v2024.0.0-64-gc0836a6"
|
||||
frcYear = "2024"
|
||||
mrcalVersion = "dev-v2024.0.0-7-gc976aaa";
|
||||
libcameraDriverVersion = "v2025.0.3"
|
||||
rknnVersion = "v2025.0.0"
|
||||
frcYear = "2025"
|
||||
mrcalVersion = "v2025.0.0";
|
||||
|
||||
|
||||
pubVersion = versionString
|
||||
@@ -50,13 +60,17 @@ ext {
|
||||
println("Building for platform " + jniPlatform + " wpilib: " + wpilibNativeName)
|
||||
println("Using Wpilib: " + wpilibVersion)
|
||||
println("Using OpenCV: " + openCVversion)
|
||||
|
||||
|
||||
photonMavenURL = 'https://maven.photonvision.org/' + (isDev ? 'snapshots' : 'releases');
|
||||
println("Publishing Photonlib to " + photonMavenURL)
|
||||
}
|
||||
|
||||
spotless {
|
||||
java {
|
||||
target fileTree('.') {
|
||||
include '**/*.java'
|
||||
exclude '**/build/**', '**/build-*/**', "photon-core\\src\\main\\java\\org\\photonvision\\PhotonVersion.java", "photon-lib\\src\\main\\java\\org\\photonvision\\PhotonVersion.java"
|
||||
exclude '**/build/**', '**/build-*/**', '**/src/generated/**'
|
||||
}
|
||||
toggleOffOn()
|
||||
googleJavaFormat()
|
||||
@@ -76,16 +90,6 @@ spotless {
|
||||
trimTrailingWhitespace()
|
||||
endWithNewline()
|
||||
}
|
||||
format 'xml', {
|
||||
target fileTree('.') {
|
||||
include '**/*.xml'
|
||||
exclude '**/build/**', '**/build-*/**', "**/.idea/**"
|
||||
}
|
||||
eclipseWtp('xml')
|
||||
trimTrailingWhitespace()
|
||||
indentWithSpaces(2)
|
||||
endWithNewline()
|
||||
}
|
||||
format 'misc', {
|
||||
target fileTree('.') {
|
||||
include '**/*.md', '**/.gitignore'
|
||||
@@ -98,9 +102,23 @@ spotless {
|
||||
}
|
||||
|
||||
wrapper {
|
||||
gradleVersion '8.4'
|
||||
gradleVersion '8.11'
|
||||
}
|
||||
|
||||
ext.getCurrentArch = {
|
||||
return NativePlatforms.desktop
|
||||
}
|
||||
|
||||
subprojects {
|
||||
tasks.withType(JavaCompile) {
|
||||
options.compilerArgs.add '-XDstringConcat=inline'
|
||||
options.encoding = 'UTF-8'
|
||||
}
|
||||
|
||||
// Enables UTF-8 support in Javadoc
|
||||
tasks.withType(Javadoc) {
|
||||
options.addStringOption("charset", "utf-8")
|
||||
options.addStringOption("docencoding", "utf-8")
|
||||
options.addStringOption("encoding", "utf-8")
|
||||
}
|
||||
}
|
||||
|
||||
@@ -1,12 +1,12 @@
|
||||
import argparse
|
||||
import base64
|
||||
from dataclasses import dataclass
|
||||
import json
|
||||
import os
|
||||
from typing import Union
|
||||
from dataclasses import dataclass
|
||||
|
||||
import cv2
|
||||
import numpy as np
|
||||
import mrcal
|
||||
import numpy as np
|
||||
from wpimath.geometry import Quaternion as _Quat
|
||||
|
||||
|
||||
@@ -162,9 +162,9 @@ def __convert_cal_to_mrcal_cameramodel(
|
||||
"indices_point_camintrinsics_camextrinsics": None,
|
||||
"lensmodel": model,
|
||||
"imagersizes": np.array([imagersize], dtype=np.int32),
|
||||
"calobject_warp": np.array(cal.calobjectWarp)
|
||||
if len(cal.calobjectWarp) > 0
|
||||
else None,
|
||||
"calobject_warp": (
|
||||
np.array(cal.calobjectWarp) if len(cal.calobjectWarp) > 0 else None
|
||||
),
|
||||
# We always do all the things
|
||||
"do_optimize_intrinsics_core": True,
|
||||
"do_optimize_intrinsics_distortions": True,
|
||||
|
||||
9
docs/.gitignore
vendored
Normal file
@@ -0,0 +1,9 @@
|
||||
build/*
|
||||
.DS_Store
|
||||
.vscode/*
|
||||
.idea/*
|
||||
source/_build
|
||||
source/docs/_build
|
||||
|
||||
venv/*
|
||||
.venv/*
|
||||
16
docs/.styleguide
Normal file
@@ -0,0 +1,16 @@
|
||||
|
||||
modifiableFileExclude {
|
||||
\.jpg$
|
||||
\.jpeg$
|
||||
\.png$
|
||||
\.gif$
|
||||
\.so$
|
||||
\.pdf$
|
||||
\.mp4$
|
||||
\.dll$
|
||||
\.webp$
|
||||
\.ico$
|
||||
\.rknn$
|
||||
\.svg$
|
||||
gradlew
|
||||
}
|
||||
395
docs/LICENSE
Normal file
@@ -0,0 +1,395 @@
|
||||
Attribution 4.0 International
|
||||
|
||||
=======================================================================
|
||||
|
||||
Creative Commons Corporation ("Creative Commons") is not a law firm and
|
||||
does not provide legal services or legal advice. Distribution of
|
||||
Creative Commons public licenses does not create a lawyer-client or
|
||||
other relationship. Creative Commons makes its licenses and related
|
||||
information available on an "as-is" basis. Creative Commons gives no
|
||||
warranties regarding its licenses, any material licensed under their
|
||||
terms and conditions, or any related information. Creative Commons
|
||||
disclaims all liability for damages resulting from their use to the
|
||||
fullest extent possible.
|
||||
|
||||
Using Creative Commons Public Licenses
|
||||
|
||||
Creative Commons public licenses provide a standard set of terms and
|
||||
conditions that creators and other rights holders may use to share
|
||||
original works of authorship and other material subject to copyright
|
||||
and certain other rights specified in the public license below. The
|
||||
following considerations are for informational purposes only, are not
|
||||
exhaustive, and do not form part of our licenses.
|
||||
|
||||
Considerations for licensors: Our public licenses are
|
||||
intended for use by those authorized to give the public
|
||||
permission to use material in ways otherwise restricted by
|
||||
copyright and certain other rights. Our licenses are
|
||||
irrevocable. Licensors should read and understand the terms
|
||||
and conditions of the license they choose before applying it.
|
||||
Licensors should also secure all rights necessary before
|
||||
applying our licenses so that the public can reuse the
|
||||
material as expected. Licensors should clearly mark any
|
||||
material not subject to the license. This includes other CC-
|
||||
licensed material, or material used under an exception or
|
||||
limitation to copyright. More considerations for licensors:
|
||||
wiki.creativecommons.org/Considerations_for_licensors
|
||||
|
||||
Considerations for the public: By using one of our public
|
||||
licenses, a licensor grants the public permission to use the
|
||||
licensed material under specified terms and conditions. If
|
||||
the licensor's permission is not necessary for any reason--for
|
||||
example, because of any applicable exception or limitation to
|
||||
copyright--then that use is not regulated by the license. Our
|
||||
licenses grant only permissions under copyright and certain
|
||||
other rights that a licensor has authority to grant. Use of
|
||||
the licensed material may still be restricted for other
|
||||
reasons, including because others have copyright or other
|
||||
rights in the material. A licensor may make special requests,
|
||||
such as asking that all changes be marked or described.
|
||||
Although not required by our licenses, you are encouraged to
|
||||
respect those requests where reasonable. More_considerations
|
||||
for the public:
|
||||
wiki.creativecommons.org/Considerations_for_licensees
|
||||
|
||||
=======================================================================
|
||||
|
||||
Creative Commons Attribution 4.0 International Public License
|
||||
|
||||
By exercising the Licensed Rights (defined below), You accept and agree
|
||||
to be bound by the terms and conditions of this Creative Commons
|
||||
Attribution 4.0 International Public License ("Public License"). To the
|
||||
extent this Public License may be interpreted as a contract, You are
|
||||
granted the Licensed Rights in consideration of Your acceptance of
|
||||
these terms and conditions, and the Licensor grants You such rights in
|
||||
consideration of benefits the Licensor receives from making the
|
||||
Licensed Material available under these terms and conditions.
|
||||
|
||||
|
||||
Section 1 -- Definitions.
|
||||
|
||||
a. Adapted Material means material subject to Copyright and Similar
|
||||
Rights that is derived from or based upon the Licensed Material
|
||||
and in which the Licensed Material is translated, altered,
|
||||
arranged, transformed, or otherwise modified in a manner requiring
|
||||
permission under the Copyright and Similar Rights held by the
|
||||
Licensor. For purposes of this Public License, where the Licensed
|
||||
Material is a musical work, performance, or sound recording,
|
||||
Adapted Material is always produced where the Licensed Material is
|
||||
synched in timed relation with a moving image.
|
||||
|
||||
b. Adapter's License means the license You apply to Your Copyright
|
||||
and Similar Rights in Your contributions to Adapted Material in
|
||||
accordance with the terms and conditions of this Public License.
|
||||
|
||||
c. Copyright and Similar Rights means copyright and/or similar rights
|
||||
closely related to copyright including, without limitation,
|
||||
performance, broadcast, sound recording, and Sui Generis Database
|
||||
Rights, without regard to how the rights are labeled or
|
||||
categorized. For purposes of this Public License, the rights
|
||||
specified in Section 2(b)(1)-(2) are not Copyright and Similar
|
||||
Rights.
|
||||
|
||||
d. Effective Technological Measures means those measures that, in the
|
||||
absence of proper authority, may not be circumvented under laws
|
||||
fulfilling obligations under Article 11 of the WIPO Copyright
|
||||
Treaty adopted on December 20, 1996, and/or similar international
|
||||
agreements.
|
||||
|
||||
e. Exceptions and Limitations means fair use, fair dealing, and/or
|
||||
any other exception or limitation to Copyright and Similar Rights
|
||||
that applies to Your use of the Licensed Material.
|
||||
|
||||
f. Licensed Material means the artistic or literary work, database,
|
||||
or other material to which the Licensor applied this Public
|
||||
License.
|
||||
|
||||
g. Licensed Rights means the rights granted to You subject to the
|
||||
terms and conditions of this Public License, which are limited to
|
||||
all Copyright and Similar Rights that apply to Your use of the
|
||||
Licensed Material and that the Licensor has authority to license.
|
||||
|
||||
h. Licensor means the individual(s) or entity(ies) granting rights
|
||||
under this Public License.
|
||||
|
||||
i. Share means to provide material to the public by any means or
|
||||
process that requires permission under the Licensed Rights, such
|
||||
as reproduction, public display, public performance, distribution,
|
||||
dissemination, communication, or importation, and to make material
|
||||
available to the public including in ways that members of the
|
||||
public may access the material from a place and at a time
|
||||
individually chosen by them.
|
||||
|
||||
j. Sui Generis Database Rights means rights other than copyright
|
||||
resulting from Directive 96/9/EC of the European Parliament and of
|
||||
the Council of 11 March 1996 on the legal protection of databases,
|
||||
as amended and/or succeeded, as well as other essentially
|
||||
equivalent rights anywhere in the world.
|
||||
|
||||
k. You means the individual or entity exercising the Licensed Rights
|
||||
under this Public License. Your has a corresponding meaning.
|
||||
|
||||
|
||||
Section 2 -- Scope.
|
||||
|
||||
a. License grant.
|
||||
|
||||
1. Subject to the terms and conditions of this Public License,
|
||||
the Licensor hereby grants You a worldwide, royalty-free,
|
||||
non-sublicensable, non-exclusive, irrevocable license to
|
||||
exercise the Licensed Rights in the Licensed Material to:
|
||||
|
||||
a. reproduce and Share the Licensed Material, in whole or
|
||||
in part; and
|
||||
|
||||
b. produce, reproduce, and Share Adapted Material.
|
||||
|
||||
2. Exceptions and Limitations. For the avoidance of doubt, where
|
||||
Exceptions and Limitations apply to Your use, this Public
|
||||
License does not apply, and You do not need to comply with
|
||||
its terms and conditions.
|
||||
|
||||
3. Term. The term of this Public License is specified in Section
|
||||
6(a).
|
||||
|
||||
4. Media and formats; technical modifications allowed. The
|
||||
Licensor authorizes You to exercise the Licensed Rights in
|
||||
all media and formats whether now known or hereafter created,
|
||||
and to make technical modifications necessary to do so. The
|
||||
Licensor waives and/or agrees not to assert any right or
|
||||
authority to forbid You from making technical modifications
|
||||
necessary to exercise the Licensed Rights, including
|
||||
technical modifications necessary to circumvent Effective
|
||||
Technological Measures. For purposes of this Public License,
|
||||
simply making modifications authorized by this Section 2(a)
|
||||
(4) never produces Adapted Material.
|
||||
|
||||
5. Downstream recipients.
|
||||
|
||||
a. Offer from the Licensor -- Licensed Material. Every
|
||||
recipient of the Licensed Material automatically
|
||||
receives an offer from the Licensor to exercise the
|
||||
Licensed Rights under the terms and conditions of this
|
||||
Public License.
|
||||
|
||||
b. No downstream restrictions. You may not offer or impose
|
||||
any additional or different terms or conditions on, or
|
||||
apply any Effective Technological Measures to, the
|
||||
Licensed Material if doing so restricts exercise of the
|
||||
Licensed Rights by any recipient of the Licensed
|
||||
Material.
|
||||
|
||||
6. No endorsement. Nothing in this Public License constitutes or
|
||||
may be construed as permission to assert or imply that You
|
||||
are, or that Your use of the Licensed Material is, connected
|
||||
with, or sponsored, endorsed, or granted official status by,
|
||||
the Licensor or others designated to receive attribution as
|
||||
provided in Section 3(a)(1)(A)(i).
|
||||
|
||||
b. Other rights.
|
||||
|
||||
1. Moral rights, such as the right of integrity, are not
|
||||
licensed under this Public License, nor are publicity,
|
||||
privacy, and/or other similar personality rights; however, to
|
||||
the extent possible, the Licensor waives and/or agrees not to
|
||||
assert any such rights held by the Licensor to the limited
|
||||
extent necessary to allow You to exercise the Licensed
|
||||
Rights, but not otherwise.
|
||||
|
||||
2. Patent and trademark rights are not licensed under this
|
||||
Public License.
|
||||
|
||||
3. To the extent possible, the Licensor waives any right to
|
||||
collect royalties from You for the exercise of the Licensed
|
||||
Rights, whether directly or through a collecting society
|
||||
under any voluntary or waivable statutory or compulsory
|
||||
licensing scheme. In all other cases the Licensor expressly
|
||||
reserves any right to collect such royalties.
|
||||
|
||||
|
||||
Section 3 -- License Conditions.
|
||||
|
||||
Your exercise of the Licensed Rights is expressly made subject to the
|
||||
following conditions.
|
||||
|
||||
a. Attribution.
|
||||
|
||||
1. If You Share the Licensed Material (including in modified
|
||||
form), You must:
|
||||
|
||||
a. retain the following if it is supplied by the Licensor
|
||||
with the Licensed Material:
|
||||
|
||||
i. identification of the creator(s) of the Licensed
|
||||
Material and any others designated to receive
|
||||
attribution, in any reasonable manner requested by
|
||||
the Licensor (including by pseudonym if
|
||||
designated);
|
||||
|
||||
ii. a copyright notice;
|
||||
|
||||
iii. a notice that refers to this Public License;
|
||||
|
||||
iv. a notice that refers to the disclaimer of
|
||||
warranties;
|
||||
|
||||
v. a URI or hyperlink to the Licensed Material to the
|
||||
extent reasonably practicable;
|
||||
|
||||
b. indicate if You modified the Licensed Material and
|
||||
retain an indication of any previous modifications; and
|
||||
|
||||
c. indicate the Licensed Material is licensed under this
|
||||
Public License, and include the text of, or the URI or
|
||||
hyperlink to, this Public License.
|
||||
|
||||
2. You may satisfy the conditions in Section 3(a)(1) in any
|
||||
reasonable manner based on the medium, means, and context in
|
||||
which You Share the Licensed Material. For example, it may be
|
||||
reasonable to satisfy the conditions by providing a URI or
|
||||
hyperlink to a resource that includes the required
|
||||
information.
|
||||
|
||||
3. If requested by the Licensor, You must remove any of the
|
||||
information required by Section 3(a)(1)(A) to the extent
|
||||
reasonably practicable.
|
||||
|
||||
4. If You Share Adapted Material You produce, the Adapter's
|
||||
License You apply must not prevent recipients of the Adapted
|
||||
Material from complying with this Public License.
|
||||
|
||||
|
||||
Section 4 -- Sui Generis Database Rights.
|
||||
|
||||
Where the Licensed Rights include Sui Generis Database Rights that
|
||||
apply to Your use of the Licensed Material:
|
||||
|
||||
a. for the avoidance of doubt, Section 2(a)(1) grants You the right
|
||||
to extract, reuse, reproduce, and Share all or a substantial
|
||||
portion of the contents of the database;
|
||||
|
||||
b. if You include all or a substantial portion of the database
|
||||
contents in a database in which You have Sui Generis Database
|
||||
Rights, then the database in which You have Sui Generis Database
|
||||
Rights (but not its individual contents) is Adapted Material; and
|
||||
|
||||
c. You must comply with the conditions in Section 3(a) if You Share
|
||||
all or a substantial portion of the contents of the database.
|
||||
|
||||
For the avoidance of doubt, this Section 4 supplements and does not
|
||||
replace Your obligations under this Public License where the Licensed
|
||||
Rights include other Copyright and Similar Rights.
|
||||
|
||||
|
||||
Section 5 -- Disclaimer of Warranties and Limitation of Liability.
|
||||
|
||||
a. UNLESS OTHERWISE SEPARATELY UNDERTAKEN BY THE LICENSOR, TO THE
|
||||
EXTENT POSSIBLE, THE LICENSOR OFFERS THE LICENSED MATERIAL AS-IS
|
||||
AND AS-AVAILABLE, AND MAKES NO REPRESENTATIONS OR WARRANTIES OF
|
||||
ANY KIND CONCERNING THE LICENSED MATERIAL, WHETHER EXPRESS,
|
||||
IMPLIED, STATUTORY, OR OTHER. THIS INCLUDES, WITHOUT LIMITATION,
|
||||
WARRANTIES OF TITLE, MERCHANTABILITY, FITNESS FOR A PARTICULAR
|
||||
PURPOSE, NON-INFRINGEMENT, ABSENCE OF LATENT OR OTHER DEFECTS,
|
||||
ACCURACY, OR THE PRESENCE OR ABSENCE OF ERRORS, WHETHER OR NOT
|
||||
KNOWN OR DISCOVERABLE. WHERE DISCLAIMERS OF WARRANTIES ARE NOT
|
||||
ALLOWED IN FULL OR IN PART, THIS DISCLAIMER MAY NOT APPLY TO YOU.
|
||||
|
||||
b. TO THE EXTENT POSSIBLE, IN NO EVENT WILL THE LICENSOR BE LIABLE
|
||||
TO YOU ON ANY LEGAL THEORY (INCLUDING, WITHOUT LIMITATION,
|
||||
NEGLIGENCE) OR OTHERWISE FOR ANY DIRECT, SPECIAL, INDIRECT,
|
||||
INCIDENTAL, CONSEQUENTIAL, PUNITIVE, EXEMPLARY, OR OTHER LOSSES,
|
||||
COSTS, EXPENSES, OR DAMAGES ARISING OUT OF THIS PUBLIC LICENSE OR
|
||||
USE OF THE LICENSED MATERIAL, EVEN IF THE LICENSOR HAS BEEN
|
||||
ADVISED OF THE POSSIBILITY OF SUCH LOSSES, COSTS, EXPENSES, OR
|
||||
DAMAGES. WHERE A LIMITATION OF LIABILITY IS NOT ALLOWED IN FULL OR
|
||||
IN PART, THIS LIMITATION MAY NOT APPLY TO YOU.
|
||||
|
||||
c. The disclaimer of warranties and limitation of liability provided
|
||||
above shall be interpreted in a manner that, to the extent
|
||||
possible, most closely approximates an absolute disclaimer and
|
||||
waiver of all liability.
|
||||
|
||||
|
||||
Section 6 -- Term and Termination.
|
||||
|
||||
a. This Public License applies for the term of the Copyright and
|
||||
Similar Rights licensed here. However, if You fail to comply with
|
||||
this Public License, then Your rights under this Public License
|
||||
terminate automatically.
|
||||
|
||||
b. Where Your right to use the Licensed Material has terminated under
|
||||
Section 6(a), it reinstates:
|
||||
|
||||
1. automatically as of the date the violation is cured, provided
|
||||
it is cured within 30 days of Your discovery of the
|
||||
violation; or
|
||||
|
||||
2. upon express reinstatement by the Licensor.
|
||||
|
||||
For the avoidance of doubt, this Section 6(b) does not affect any
|
||||
right the Licensor may have to seek remedies for Your violations
|
||||
of this Public License.
|
||||
|
||||
c. For the avoidance of doubt, the Licensor may also offer the
|
||||
Licensed Material under separate terms or conditions or stop
|
||||
distributing the Licensed Material at any time; however, doing so
|
||||
will not terminate this Public License.
|
||||
|
||||
d. Sections 1, 5, 6, 7, and 8 survive termination of this Public
|
||||
License.
|
||||
|
||||
|
||||
Section 7 -- Other Terms and Conditions.
|
||||
|
||||
a. The Licensor shall not be bound by any additional or different
|
||||
terms or conditions communicated by You unless expressly agreed.
|
||||
|
||||
b. Any arrangements, understandings, or agreements regarding the
|
||||
Licensed Material not stated herein are separate from and
|
||||
independent of the terms and conditions of this Public License.
|
||||
|
||||
|
||||
Section 8 -- Interpretation.
|
||||
|
||||
a. For the avoidance of doubt, this Public License does not, and
|
||||
shall not be interpreted to, reduce, limit, restrict, or impose
|
||||
conditions on any use of the Licensed Material that could lawfully
|
||||
be made without permission under this Public License.
|
||||
|
||||
b. To the extent possible, if any provision of this Public License is
|
||||
deemed unenforceable, it shall be automatically reformed to the
|
||||
minimum extent necessary to make it enforceable. If the provision
|
||||
cannot be reformed, it shall be severed from this Public License
|
||||
without affecting the enforceability of the remaining terms and
|
||||
conditions.
|
||||
|
||||
c. No term or condition of this Public License will be waived and no
|
||||
failure to comply consented to unless expressly agreed to by the
|
||||
Licensor.
|
||||
|
||||
d. Nothing in this Public License constitutes or may be interpreted
|
||||
as a limitation upon, or waiver of, any privileges and immunities
|
||||
that apply to the Licensor or You, including from the legal
|
||||
processes of any jurisdiction or authority.
|
||||
|
||||
|
||||
=======================================================================
|
||||
|
||||
Creative Commons is not a party to its public
|
||||
licenses. Notwithstanding, Creative Commons may elect to apply one of
|
||||
its public licenses to material it publishes and in those instances
|
||||
will be considered the “Licensor.” The text of the Creative Commons
|
||||
public licenses is dedicated to the public domain under the CC0 Public
|
||||
Domain Dedication. Except for the limited purpose of indicating that
|
||||
material is shared under a Creative Commons public license or as
|
||||
otherwise permitted by the Creative Commons policies published at
|
||||
creativecommons.org/policies, Creative Commons does not authorize the
|
||||
use of the trademark "Creative Commons" or any other trademark or logo
|
||||
of Creative Commons without its prior written consent including,
|
||||
without limitation, in connection with any unauthorized modifications
|
||||
to any of its public licenses or any other arrangements,
|
||||
understandings, or agreements concerning use of licensed material. For
|
||||
the avoidance of doubt, this paragraph does not form part of the
|
||||
public licenses.
|
||||
|
||||
Creative Commons may be contacted at creativecommons.org.
|
||||
24
docs/Makefile
Normal file
@@ -0,0 +1,24 @@
|
||||
# Minimal makefile for Sphinx documentation
|
||||
#
|
||||
|
||||
# You can set these variables from the command line.
|
||||
SPHINXOPTS = -W --keep-going
|
||||
SPHINXBUILD = sphinx-build
|
||||
SOURCEDIR = source
|
||||
LINTER = doc8
|
||||
LINTEROPTS = --ignore D001 # D001 is linelength
|
||||
BUILDDIR = build
|
||||
|
||||
# Put it first so that "make" without argument is like "make help".
|
||||
help:
|
||||
@$(SPHINXBUILD) -M help "$(SOURCEDIR)" "$(BUILDDIR)" $(SPHINXOPTS) $(O)
|
||||
|
||||
lint:
|
||||
@$(LINTER) $(LINTEROPTS) $(SOURCEDIR)
|
||||
|
||||
.PHONY: help Makefile
|
||||
|
||||
# Catch-all target: route all unknown targets to Sphinx using the new
|
||||
# "make mode" option. $(O) is meant as a shortcut for $(SPHINXOPTS).
|
||||
%: Makefile
|
||||
@$(SPHINXBUILD) -M $@ "$(SOURCEDIR)" "$(BUILDDIR)" $(SPHINXOPTS) $(O)
|
||||
9
docs/README.MD
Normal file
@@ -0,0 +1,9 @@
|
||||
# PhotonVision ReadTheDocs
|
||||
|
||||
[](https://docs.photonvision.org/en/latest/?badge=latest)
|
||||
|
||||
PhotonVision is a free open-source vision processing software for FRC teams.
|
||||
|
||||
This repository is the source code for our ReadTheDocs documentation, which can be found [here](https://docs.photonvision.org).
|
||||
|
||||
[Contribution and formatting guidelines for this project](https://docs.photonvision.org/en/latest/docs/contributing/index.html)
|
||||
36
docs/make.bat
Normal file
@@ -0,0 +1,36 @@
|
||||
@ECHO OFF
|
||||
|
||||
pushd %~dp0
|
||||
|
||||
REM Command file for Sphinx documentation
|
||||
|
||||
if "%SPHINXBUILD%" == "" (
|
||||
set SPHINXBUILD=sphinx-build
|
||||
)
|
||||
set SOURCEDIR=source
|
||||
set BUILDDIR=build
|
||||
set SPHINXOPTS=-W --keep-going
|
||||
|
||||
if "%1" == "" goto help
|
||||
|
||||
%SPHINXBUILD% >NUL 2>NUL
|
||||
if errorlevel 9009 (
|
||||
echo.
|
||||
echo.The 'sphinx-build' command was not found. Make sure you have Sphinx
|
||||
echo.installed, then set the SPHINXBUILD environment variable to point
|
||||
echo.to the full path of the 'sphinx-build' executable. Alternatively you
|
||||
echo.may add the Sphinx directory to PATH.
|
||||
echo.
|
||||
echo.If you don't have Sphinx installed, grab it from
|
||||
echo.http://sphinx-doc.org/
|
||||
exit /b 1
|
||||
)
|
||||
|
||||
%SPHINXBUILD% -M %1 %SOURCEDIR% %BUILDDIR% %SPHINXOPTS%
|
||||
goto end
|
||||
|
||||
:help
|
||||
%SPHINXBUILD% -M help %SOURCEDIR% %BUILDDIR% %SPHINXOPTS%
|
||||
|
||||
:end
|
||||
popd
|
||||
44
docs/requirements.txt
Normal file
@@ -0,0 +1,44 @@
|
||||
alabaster==0.7.13
|
||||
Babel==2.13.1
|
||||
beautifulsoup4==4.12.2
|
||||
certifi==2023.11.17
|
||||
charset-normalizer==3.3.2
|
||||
colorama==0.4.6
|
||||
doc8==0.11.2
|
||||
docopt==0.6.2
|
||||
docutils==0.18.1
|
||||
furo==2023.9.10
|
||||
idna==3.4
|
||||
imagesize==1.4.1
|
||||
Jinja2==3.0.3
|
||||
MarkupSafe==2.1.3
|
||||
packaging==23.2
|
||||
pbr==6.0.0
|
||||
pipreqs==0.4.13
|
||||
Pygments==2.17.1
|
||||
requests==2.31.0
|
||||
restructuredtext-lint==1.4.0
|
||||
six==1.16.0
|
||||
snowballstemmer==2.2.0
|
||||
soupsieve==2.5
|
||||
Sphinx==7.2.6
|
||||
sphinx-basic-ng==1.0.0b2
|
||||
sphinx-notfound-page==1.0.0
|
||||
sphinx-rtd-theme==1.3.0
|
||||
sphinx-tabs==3.4.4
|
||||
sphinx_design==0.5.0
|
||||
sphinxcontrib-applehelp==1.0.7
|
||||
sphinxcontrib-devhelp==1.0.5
|
||||
sphinxcontrib-ghcontributors==0.2.3
|
||||
sphinxcontrib-htmlhelp==2.0.4
|
||||
sphinxcontrib-jquery==4.1
|
||||
sphinxcontrib-jsmath==1.0.1
|
||||
sphinxcontrib-qthelp==1.0.6
|
||||
sphinxcontrib-serializinghtml==1.1.9
|
||||
sphinxext-opengraph==0.9.0
|
||||
sphinxext-remoteliteralinclude==0.4.0
|
||||
stevedore==5.1.0
|
||||
urllib3==2.1.0
|
||||
yarg==0.1.9
|
||||
sphinx-autobuild==2024.4.16
|
||||
myst_parser==3.0.1
|
||||
7
docs/source/404.md
Normal file
@@ -0,0 +1,7 @@
|
||||
---
|
||||
orphan: true
|
||||
---
|
||||
|
||||
# Requested Page Not Found
|
||||
|
||||
This page you were looking for was not found. If you think this is a mistake, [file an issue on our GitHub.](https://github.com/PhotonVision/photonvision-docs/issues)
|
||||
20
docs/source/Makefile
Normal file
@@ -0,0 +1,20 @@
|
||||
# Minimal makefile for Sphinx documentation
|
||||
#
|
||||
|
||||
# You can set these variables from the command line, and also
|
||||
# from the environment for the first two.
|
||||
SPHINXOPTS ?=
|
||||
SPHINXBUILD ?= sphinx-build
|
||||
SOURCEDIR = source
|
||||
BUILDDIR = build
|
||||
|
||||
# Put it first so that "make" without argument is like "make help".
|
||||
help:
|
||||
@$(SPHINXBUILD) -M help "$(SOURCEDIR)" "$(BUILDDIR)" $(SPHINXOPTS) $(O)
|
||||
|
||||
.PHONY: help Makefile
|
||||
|
||||
# Catch-all target: route all unknown targets to Sphinx using the new
|
||||
# "make mode" option. $(O) is meant as a shortcut for $(SPHINXOPTS).
|
||||
%: Makefile
|
||||
@$(SPHINXBUILD) -M $@ "$(SOURCEDIR)" "$(BUILDDIR)" $(SPHINXOPTS) $(O)
|
||||
BIN
docs/source/_static/assets/3d2019.mp4
Normal file
BIN
docs/source/_static/assets/3d2020.mp4
Normal file
BIN
docs/source/_static/assets/AreaRatioFullness.mp4
Normal file
BIN
docs/source/_static/assets/PhotonVision-Header-noBG.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 56 KiB |
BIN
docs/source/_static/assets/PhotonVision-Header-onWhite.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 56 KiB |
BIN
docs/source/_static/assets/RoundLogo.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 27 KiB |
BIN
docs/source/_static/assets/RoundLogoLight.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 17 KiB |
BIN
docs/source/_static/assets/calibration_small.mp4
Normal file
BIN
docs/source/_static/assets/colorPicker.mp4
Normal file
BIN
docs/source/_static/assets/groupingSorting.mp4
Normal file
BIN
docs/source/_static/assets/import-export-settings.mp4
Normal file
BIN
docs/source/_static/assets/logGui.mp4
Normal file
BIN
docs/source/_static/assets/objdetectFiltering.mp4
Normal file
BIN
docs/source/_static/assets/offsetandmultiple.mp4
Normal file
BIN
docs/source/_static/assets/poseest_demo.mp4
Normal file
BIN
docs/source/_static/assets/simaimandrange.mp4
Normal file
BIN
docs/source/_static/assets/tuningHueSatVal.mp4
Normal file
17
docs/source/_static/css/pv-icons.css
Normal file
@@ -0,0 +1,17 @@
|
||||
/*!
|
||||
* Font Awesome 4.7.0 by @davegandy - http://fontawesome.io - @fontawesome
|
||||
* License - http://fontawesome.io/license (Font: SIL OFL 1.1, CSS: MIT License)
|
||||
*/
|
||||
|
||||
@font-face {
|
||||
font-family: FontAwesome;
|
||||
src: url(fonts/fontawesome-webfont.eot?674f50d287a8c48dc19ba404d20fe713);
|
||||
src: url(fonts/fontawesome-webfont.eot?674f50d287a8c48dc19ba404d20fe713?#iefix&v=4.7.0) format("embedded-opentype"), url(fonts/fontawesome-webfont.woff2?af7ae505a9eed503f8b8e6982036873e) format("woff2"), url(fonts/fontawesome-webfont.woff?fee66e712a8a08eef5805a46892932ad) format("woff"), url(fonts/fontawesome-webfont.ttf?b06871f281fee6b241d60582ae9369b9) format("truetype"), url(fonts/fontawesome-webfont.svg?912ec66d7572ff821749319396470bde#fontawesomeregular) format("svg");
|
||||
font-weight: 400;
|
||||
font-style:normal
|
||||
}
|
||||
|
||||
.code-block-caption>.headerlink, dl dt>.headerlink, h1>.headerlink, h2>.headerlink, h3>.headerlink, h4>.headerlink, h5>.headerlink, h6>.headerlink, p.caption>.headerlink, table>caption>.headerlink {
|
||||
font-family: FontAwesome;
|
||||
font-size: 0.75em;
|
||||
}
|
||||
74
docs/source/_templates/layout.html
Normal file
@@ -0,0 +1,74 @@
|
||||
{# Import the theme's layout. #}
|
||||
{% extends '!layout.html' %}
|
||||
|
||||
{%- block extrahead %}
|
||||
<script>
|
||||
if (localStorage.getItem("colorTheme") === "dark") {
|
||||
document.documentElement.setAttribute('data-theme', 'dark');
|
||||
} else if (localStorage.getItem("colorTheme") === "light") {
|
||||
document.documentElement.setAttribute('data-theme', 'light');
|
||||
} else {
|
||||
var userPrefersDark = window.matchMedia && window.matchMedia('(prefers-color-scheme: dark)').matches;
|
||||
if (userPrefersDark) {
|
||||
document.documentElement.setAttribute('data-theme', 'dark');
|
||||
} else {
|
||||
document.documentElement.setAttribute('data-theme', 'light');
|
||||
}
|
||||
}
|
||||
|
||||
</script>
|
||||
|
||||
{# Call the parent block #}
|
||||
{{ super() }}
|
||||
{% endblock %}
|
||||
|
||||
{%- block extrafooter %}
|
||||
{# Add custom things to the head HTML tag #}
|
||||
|
||||
<div class="dark-mode-toggle-container">
|
||||
<strong class="light-label md-icon"></strong>
|
||||
|
||||
<div class="dark-mode-toggle">
|
||||
<input type="checkbox" id="switch" name="theme"/><label class="toggle" for="switch">Toggle</label>
|
||||
</div>
|
||||
|
||||
<strong class="dark-label md-icon"></strong>
|
||||
</div>
|
||||
|
||||
<script>
|
||||
var checkbox = document.querySelector('input[name=theme]');
|
||||
|
||||
var element = document.documentElement.getAttribute('data-theme');
|
||||
|
||||
if (element == 'dark') {
|
||||
// Auto check the checkbox if the set theme is "dark".
|
||||
checkbox.checked = true;
|
||||
}
|
||||
|
||||
checkbox.addEventListener('change', function() {
|
||||
if (this.checked) {
|
||||
document.documentElement.setAttribute('data-theme', 'dark');
|
||||
localStorage.setItem("colorTheme", "dark");
|
||||
} else {
|
||||
document.documentElement.setAttribute('data-theme', 'light');
|
||||
localStorage.setItem("colorTheme", "light");
|
||||
}
|
||||
});
|
||||
|
||||
window.matchMedia('(prefers-color-scheme: dark)')
|
||||
.addEventListener('change', event => {
|
||||
if (event.matches) {
|
||||
document.documentElement.setAttribute('data-theme', 'dark');
|
||||
localStorage.setItem("colorTheme", "dark");
|
||||
checkbox.checked = true;
|
||||
} else {
|
||||
document.documentElement.setAttribute('data-theme', 'light');
|
||||
localStorage.setItem("colorTheme", "light");
|
||||
checkbox.checked = false;
|
||||
}
|
||||
});
|
||||
</script>
|
||||
|
||||
{# Call the parent block #}
|
||||
{{ super() }}
|
||||
{%- endblock %}
|
||||
BIN
docs/source/assets/PhotonVision-Header-noBG.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 56 KiB |
BIN
docs/source/assets/PhotonVision-Header-onWhite.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 56 KiB |
BIN
docs/source/assets/RectLogo.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 46 KiB |
BIN
docs/source/assets/RoundLogo.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 27 KiB |
BIN
docs/source/assets/RoundLogoWhite.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 17 KiB |
153
docs/source/conf.py
Normal file
@@ -0,0 +1,153 @@
|
||||
# Configuration file for the Sphinx documentation builder.
|
||||
#
|
||||
# This file only contains a selection of the most common options. For a full
|
||||
# list see the documentation:
|
||||
# https://www.sphinx-doc.org/en/master/usage/configuration.html
|
||||
|
||||
# -- Path setup --------------------------------------------------------------
|
||||
|
||||
# If extensions (or modules to document with autodoc) are in another directory,
|
||||
# add these directories to sys.path here. If the directory is relative to the
|
||||
# documentation root, use os.path.abspath to make it absolute, like shown here.
|
||||
#
|
||||
import os
|
||||
|
||||
# import sys
|
||||
# sys.path.insert(0, os.path.abspath('.'))
|
||||
|
||||
# -- Project information -----------------------------------------------------
|
||||
|
||||
project = "PhotonVision"
|
||||
copyright = "2024, PhotonVision"
|
||||
author = "Banks Troutman, Matt Morley"
|
||||
|
||||
# -- General configuration ---------------------------------------------------
|
||||
|
||||
# Add any Sphinx extension module names here, as strings. They can be
|
||||
# extensions coming with Sphinx (named 'sphinx.ext.*') or your custom
|
||||
# ones.
|
||||
extensions = [
|
||||
"sphinx_rtd_theme",
|
||||
"sphinx.ext.autosectionlabel",
|
||||
"sphinx.ext.todo",
|
||||
"sphinx_tabs.tabs",
|
||||
"notfound.extension",
|
||||
"sphinxext.remoteliteralinclude",
|
||||
"sphinxext.opengraph",
|
||||
"sphinxcontrib.ghcontributors",
|
||||
"sphinx_design",
|
||||
"myst_parser",
|
||||
"sphinx.ext.mathjax",
|
||||
"sphinx.ext.graphviz",
|
||||
]
|
||||
|
||||
# Configure OpenGraph support
|
||||
|
||||
ogp_site_url = "https://docs.photonvision.org/en/latest/"
|
||||
ogp_site_name = "PhotonVision Documentation"
|
||||
ogp_image = "https://raw.githubusercontent.com/PhotonVision/photonvision-docs/main/source/assets/RectLogo.png"
|
||||
|
||||
# Add any paths that contain templates here, relative to this directory.
|
||||
templates_path = ["_templates"]
|
||||
|
||||
# List of patterns, relative to source directory, that match files and
|
||||
# directories to ignore when looking for source files.
|
||||
# This pattern also affects html_static_path and html_extra_path.
|
||||
exclude_patterns = []
|
||||
|
||||
# Enable hover content on glossary term
|
||||
hoverxref_roles = ["term"]
|
||||
|
||||
# Autosection labels prefix document path and filename
|
||||
autosectionlabel_prefix_document = True
|
||||
|
||||
# -- Options for HTML output -------------------------------------------------
|
||||
|
||||
html_title = "PhotonVision Docs"
|
||||
|
||||
# The theme to use for HTML and HTML Help pages. See the documentation for
|
||||
# a list of builtin themes.
|
||||
html_theme = "furo"
|
||||
html_favicon = "assets/RoundLogo.png"
|
||||
|
||||
# Add any paths that contain custom static files (such as style sheets) here,
|
||||
# relative to this directory. They are copied after the builtin static files,
|
||||
# so a file named "default.css" will overwrite the builtin "default.css".
|
||||
html_static_path = ["_static"]
|
||||
|
||||
source_suffix = [".rst", ".md"]
|
||||
|
||||
|
||||
def setup(app):
|
||||
app.add_css_file("css/pv-icons.css")
|
||||
|
||||
|
||||
pygments_style = "sphinx"
|
||||
|
||||
html_theme_options = {
|
||||
"sidebar_hide_name": True,
|
||||
"light_logo": "assets/PhotonVision-Header-onWhite.png",
|
||||
"dark_logo": "assets/PhotonVision-Header-noBG.png",
|
||||
"light_css_variables": {
|
||||
"font-stack": "-apple-system, BlinkMacSystemFont, avenir next, avenir, segoe ui, helvetica neue, helvetica, Ubuntu, roboto, noto, arial, sans-serif;",
|
||||
"admonition-font-size": "1rem",
|
||||
"admonition-title-font-size": "1rem",
|
||||
"color-background-primary": "#ffffff",
|
||||
"color-background-secondary": "#f7f7f7",
|
||||
"color-background-hover": "#efeff400",
|
||||
"color-background-hover--transparent": "#efeff400",
|
||||
"color-brand-primary": "#006492",
|
||||
"color-brand-content": "#006492",
|
||||
"color-foreground-primary": "#2d2d2d",
|
||||
"color-foreground-secondary": "#39a4d5",
|
||||
"color-foreground-muted": "#2d2d2d",
|
||||
"color-foreground-border": "#ffffff",
|
||||
"color-background-border": "ffffff",
|
||||
"color-api-overall": "#101010",
|
||||
},
|
||||
"dark_css_variables": {
|
||||
"color-background-primary": "#242c37",
|
||||
"color-background-secondary": "#006492",
|
||||
"color-background-hover": "#efeff400",
|
||||
"color-background-hover--transparent": "#efeff400",
|
||||
"color-brand-primary": "#ffd843",
|
||||
"color-brand-secondary": "#39a4d5",
|
||||
"color-brand-content": "#ffd843",
|
||||
"color-foreground-primary": "#ffffff",
|
||||
"color-foreground-secondary": "#ffffff",
|
||||
"color-foreground-muted": "#ffffff",
|
||||
"color-foreground-border": "transparent",
|
||||
"color-background-border": "transparent",
|
||||
"color-api-overall": "#101010",
|
||||
"color-inline-code-background": "#0d0d0d",
|
||||
},
|
||||
"footer_icons": [
|
||||
{
|
||||
"name": "GitHub",
|
||||
"url": "https://github.com/photonvision/photonvision",
|
||||
"html": """
|
||||
<svg stroke="currentColor" fill="currentColor" stroke-width="0" viewBox="0 0 16 16">
|
||||
<path fill-rule="evenodd" d="M8 0C3.58 0 0 3.58 0 8c0 3.54 2.29 6.53 5.47 7.59.4.07.55-.17.55-.38 0-.19-.01-.82-.01-1.49-2.01.37-2.53-.49-2.69-.94-.09-.23-.48-.94-.82-1.13-.28-.15-.68-.52-.01-.53.63-.01 1.08.58 1.23.82.72 1.21 1.87.87 2.33.66.07-.52.28-.87.51-1.07-1.78-.2-3.64-.89-3.64-3.95 0-.87.31-1.59.82-2.15-.08-.2-.36-1.02.08-2.12 0 0 .67-.21 2.2.82.64-.18 1.32-.27 2-.27.68 0 1.36.09 2 .27 1.53-1.04 2.2-.82 2.2-.82.44 1.1.16 1.92.08 2.12.51.56.82 1.27.82 2.15 0 3.07-1.87 3.75-3.65 3.95.29.25.54.73.54 1.48 0 1.07-.01 1.93-.01 2.2 0 .21.15.46.55.38A8.013 8.013 0 0 0 16 8c0-4.42-3.58-8-8-8z"></path>
|
||||
</svg>
|
||||
""",
|
||||
"class": "",
|
||||
},
|
||||
],
|
||||
}
|
||||
|
||||
suppress_warnings = ["epub.unknown_project_files"]
|
||||
|
||||
sphinx_tabs_valid_builders = ["epub", "linkcheck"]
|
||||
|
||||
# -- Options for linkcheck -------------------------------------------------
|
||||
|
||||
# Excluded links for linkcheck
|
||||
# These should be periodically checked by hand to ensure that they are still functional
|
||||
linkcheck_ignore = [R"https://www.raspberrypi.com/software/", R"http://10\..+"]
|
||||
|
||||
token = os.environ.get("GITHUB_TOKEN", None)
|
||||
if token:
|
||||
linkcheck_auth = [(R"https://github.com/.+", token)]
|
||||
|
||||
# MyST configuration (https://myst-parser.readthedocs.io/en/latest/configuration.html)
|
||||
myst_enable_extensions = ["colon_fence"]
|
||||
33
docs/source/docs/additional-resources/best-practices.md
Normal file
@@ -0,0 +1,33 @@
|
||||
# Best Practices For Competition
|
||||
|
||||
## Before Competition
|
||||
|
||||
- Ensure you have spares of the relevant electronics if you can afford it (switch, coprocessor, cameras, etc.).
|
||||
- Stay on the latest version of PhotonVision until you have tested your full robot system to be functional.
|
||||
- Some time before the competition, lock down the version you are using and do not upgrade unless you encounter a critical bug.
|
||||
- Have a copy of the installation image for the version you are using on your programming laptop, in case re-imaging (without internet) is needed.
|
||||
- Extensively test at your home setup. Practice tuning from scratch under different lighting conditions.
|
||||
- Use SmartDashboard / Shuffleboard to view your camera streams during practice.
|
||||
- Confirm you have followed all the recommendations under the Networking section in installation (network switch and static IP).
|
||||
- Only use high quality ethernet cables that have been rigorously tested.
|
||||
- Set up RIO USB port forwarding using the guide in the Networking section in installation.
|
||||
|
||||
## During the Competition
|
||||
|
||||
- Use the field calibration time given at the start of the event:
|
||||
- Bring your robot to the field at the allotted time.
|
||||
- Make sure the field has match-accurate lighting conditions active.
|
||||
- Turn on your robot and pull up the dashboard on your driver station.
|
||||
- Point your robot at the targets and ensure you get a consistent tracking (you hold one targets consistently, the ceiling lights aren't detected, etc.).
|
||||
- If you have problems with your pipeline, go to the pipeline tuning section and retune the pipeline using the guide there.
|
||||
- Move the robot close, far, angled, and around the field to ensure no extra targets are found.
|
||||
- Monitor camera feeds during a practice match to ensure everything is working correctly.
|
||||
- After field calibration, use the "Export Settings" button in the "Settings" page to create a backup.
|
||||
- Do this for each coprocessor on your robot that runs PhotonVision, and name your exports with meaningful names.
|
||||
- This will contain camera information/calibration, pipeline information, network settings, etc.
|
||||
- In the event of software/hardware failures (IE lost SD Card, broken device), you can then use the "Import Settings" button and select "All Settings" to restore your settings.
|
||||
- This effectively works as a snapshot of your PhotonVision data that can be restored at any point.
|
||||
- Before every match:
|
||||
- Check the ethernet and USB connectors are seated fully.
|
||||
- Close streaming dashboards when you don't need them to reduce bandwidth.
|
||||
- Stream at as low of a resolution as possible while still detecting AprilTags to stay within field bandwidth limits.
|
||||
53
docs/source/docs/additional-resources/config.md
Normal file
@@ -0,0 +1,53 @@
|
||||
# Filesystem Directory
|
||||
|
||||
PhotonVision stores and loads settings in the {code}`photonvision_config` directory, in the same folder as the PhotonVision JAR is stored. On supported hardware, this is in the {code}`/opt/photonvision` directory. The contents of this directory can be exported as a zip archive from the settings page of the interface, under "export settings". This export will contain everything detailed below. These settings can later be uploaded using "import settings", to restore configurations from previous backups.
|
||||
|
||||
## Directory Structure
|
||||
|
||||
The directory structure is outlined below.
|
||||
|
||||
```{image} images/configDir.png
|
||||
:alt: Config directory structure
|
||||
:width: 600
|
||||
```
|
||||
|
||||
- calibImgs
|
||||
- Images saved from the last run of the calibration routine
|
||||
- cameras
|
||||
- Contains a subfolder for each camera. This folder contains the following files:
|
||||
- pipelines folder, which contains a {code}`json` file for each user-created pipeline.
|
||||
- config.json, which contains all camera-specific configuration. This includes FOV, pitch, current pipeline index, and calibration data
|
||||
- drivermode.json, which contains settings for the driver mode pipeline
|
||||
- imgSaves
|
||||
- Contains images saved with the input/output save commands.
|
||||
- logs
|
||||
- Contains timestamped logs in the format {code}`photonvision-YYYY-MM-D_HH-MM-SS.log`. These timestamps will likely be significantly behind the real time. Coprocessors on the robot have no way to get current time.
|
||||
- hardwareSettings.json
|
||||
- Contains hardware settings. Currently this includes only the LED brightness.
|
||||
- networkSettings.json
|
||||
- Contains network settings, including team number (or remote network tables address), static/dynamic settings, and hostname.
|
||||
|
||||
## Importing and Exporting Settings
|
||||
|
||||
The entire settings directory can be exported as a ZIP archive from the settings page.
|
||||
|
||||
```{raw} html
|
||||
<video width="85%" controls>
|
||||
<source src="../../_static/assets/import-export-settings.mp4" type="video/mp4">
|
||||
Your browser does not support the video tag.
|
||||
</video>
|
||||
```
|
||||
|
||||
A variety of files can be imported back into PhotonVision:
|
||||
|
||||
- ZIP Archive ({code}`.zip`)
|
||||
- Useful for restoring a full configuration from a different PhotonVision instance.
|
||||
- Single Config File
|
||||
- Currently-supported Files
|
||||
- {code}`hardwareConfig.json`
|
||||
- {code}`hardwareSettings.json`
|
||||
- {code}`networkSettings.json`
|
||||
- Useful for simple hardware or network configuration tasks without overwriting all settings.
|
||||
|
||||
|
||||
|
||||
BIN
docs/source/docs/additional-resources/images/configDir.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 32 KiB |
70
docs/source/docs/additional-resources/nt-api.md
Normal file
@@ -0,0 +1,70 @@
|
||||
# NetworkTables API
|
||||
|
||||
## About
|
||||
|
||||
:::{warning}
|
||||
PhotonVision interfaces with PhotonLib, our vendor dependency, using NetworkTables. If you are running PhotonVision on a robot (ie. with a RoboRIO), you should **turn the NetworkTables server switch (in the settings tab) off** in order to get PhotonLib to work. Also ensure that you set your team number. The NetworkTables server should only be enabled if you know what you're doing!
|
||||
:::
|
||||
|
||||
## API
|
||||
|
||||
:::{warning}
|
||||
NetworkTables is not a supported setup/viable option when using PhotonVision as we only send one target at a time (this is problematic when using AprilTags, which will return data from multiple tags at once). We recommend using PhotonLib.
|
||||
:::
|
||||
|
||||
The tables below contain the the name of the key for each entry that PhotonVision sends over the network and a short description of the key. The entries should be extracted from a subtable with your camera's nickname (visible in the PhotonVision UI) under the main `photonvision` table.
|
||||
|
||||
### Getting Target Information
|
||||
|
||||
| Key | Type | Description |
|
||||
| --------------- | ---------- | ------------------------------------------------------------------------ |
|
||||
| `rawBytes` | `byte[]` | A byte-packed string that contains target info from the same timestamp. |
|
||||
| `latencyMillis` | `double` | The latency of the pipeline in milliseconds. |
|
||||
| `hasTarget` | `boolean` | Whether the pipeline is detecting targets or not. |
|
||||
| `targetPitch` | `double` | The pitch of the target in degrees (positive up). |
|
||||
| `targetYaw` | `double` | The yaw of the target in degrees (positive right). |
|
||||
| `targetArea` | `double` | The area (percent of bounding box in screen) as a percent (0-100). |
|
||||
| `targetSkew` | `double` | The skew of the target in degrees (counter-clockwise positive). |
|
||||
| `targetPose` | `double[]` | The pose of the target relative to the robot (x, y, z, qw, qx, qy, qz) |
|
||||
| `targetPixelsX` | `double` | The target crosshair location horizontally, in pixels (origin top-right) |
|
||||
| `targetPixelsY` | `double` | The target crosshair location vertically, in pixels (origin top-right) |
|
||||
|
||||
### Changing Settings
|
||||
|
||||
| Key | Type | Description |
|
||||
| --------------- | --------- | --------------------------- |
|
||||
| `pipelineIndex` | `int` | Changes the pipeline index. |
|
||||
| `driverMode` | `boolean` | Toggles driver mode. |
|
||||
|
||||
### Saving Images
|
||||
|
||||
PhotonVision can save images to file on command. The image is saved when PhotonVision detects the command went from `false` to `true`.
|
||||
|
||||
PhotonVision will automatically set these back to `false` after 500ms.
|
||||
|
||||
Be careful saving images rapidly - it will slow vision processing performance and take up disk space very quickly.
|
||||
|
||||
Images are returned as part of the .zip package from the "Export" operation in the Settings tab.
|
||||
|
||||
| Key | Type | Description |
|
||||
| ------------------ | --------- | ------------------------------------------------- |
|
||||
| `inputSaveImgCmd` | `boolean` | Triggers saving the current input image to file. |
|
||||
| `outputSaveImgCmd` | `boolean` | Triggers saving the current output image to file. |
|
||||
|
||||
:::{warning}
|
||||
If you manage to make calls to these commands faster than 500ms (between calls), additional photos will not be captured.
|
||||
:::
|
||||
|
||||
### Global Entries
|
||||
|
||||
These entries are global, meaning that they should be called on the main `photonvision` table.
|
||||
|
||||
| Key | Type | Description |
|
||||
| --------- | ----- | -------------------------------------------------------- |
|
||||
| `ledMode` | `int` | Sets the LED Mode (-1: default, 0: off, 1: on, 2: blink) |
|
||||
|
||||
:::{warning}
|
||||
Setting the LED mode to -1 (default) when `multiple` cameras are connected may result in unexpected behavior. {ref}`This is a known limitation of PhotonVision. <docs/troubleshooting/common-errors:LED Control>`
|
||||
|
||||
Single camera operation should work without issue.
|
||||
:::
|
||||
BIN
docs/source/docs/advanced-installation/images/gh_actions_1.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 81 KiB |
BIN
docs/source/docs/advanced-installation/images/gh_actions_2.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 139 KiB |
BIN
docs/source/docs/advanced-installation/images/gh_actions_3.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 122 KiB |
18
docs/source/docs/advanced-installation/index.md
Normal file
@@ -0,0 +1,18 @@
|
||||
# Advanced Installation
|
||||
|
||||
This page will help you install PhotonVision on non-supported coprocessor.
|
||||
|
||||
## Step 1: Software Install
|
||||
|
||||
This section will walk you through how to install PhotonVision on your coprocessor. Your coprocessor is the device that has the camera and you are using to detect targets (ex. if you are using a Limelight / Raspberry Pi, that is your coprocessor and you should follow those instructions).
|
||||
|
||||
:::{warning}
|
||||
You only need to install PhotonVision on the coprocessor/device that is being used to detect targets, you do NOT need to install it on the device you use to view the webdashboard. All you need to view the webdashboard is for a device to be on the same network as your vision coprocessor and an internet browser.
|
||||
:::
|
||||
|
||||
```{toctree}
|
||||
:maxdepth: 3
|
||||
|
||||
sw_install/index
|
||||
prerelease-software
|
||||
```
|
||||
@@ -0,0 +1,23 @@
|
||||
# Installing Pre-Release Versions
|
||||
|
||||
Pre-release/development version of PhotonVision can be tested by installing/downloading artifacts from Github Actions (see below), which are built automatically on commits to open pull requests and to PhotonVision's `main` branch, or by {ref}`compiling PhotonVision locally <docs/contributing/building-photon:Build Instructions>`.
|
||||
|
||||
:::{warning}
|
||||
If testing a pre-release version of PhotonVision with a robot, PhotonLib must be updated to match the version downloaded! If not, packet schema definitions may not match and unexpected things will occur. To update PhotonLib, refer to {ref}`installing specific version of PhotonLib<docs/programming/photonlib/adding-vendordep:Install Specific Version - Java/C++>`.
|
||||
:::
|
||||
|
||||
GitHub Actions builds pre-release version of PhotonVision automatically on PRs and on each commit merged to main. To test a particular commit to main, navigate to the [PhotonVision commit list](https://github.com/PhotonVision/photonvision/commits/main/) and click on the check mark (below). Scroll to "Build / Build fat JAR - PLATFORM", click details, and then summary. From here, JAR and image files can be downloaded to be flashed or uploaded using "Offline Update".
|
||||
|
||||
```{image} images/gh_actions_1.png
|
||||
:alt: Github Actions Badge
|
||||
```
|
||||
|
||||
```{image} images/gh_actions_2.png
|
||||
:alt: Github Actions artifact list
|
||||
```
|
||||
|
||||
Built JAR files (but not image files) can also be downloaded from PRs before they are merged. Navigate to the PR in GitHub, and select Checks at the top. Click on "Build" to display the same artifact list as above.
|
||||
|
||||
```{image} images/gh_actions_3.png
|
||||
:alt: Github Actions artifacts from PR
|
||||
```
|
||||
@@ -0,0 +1,56 @@
|
||||
# Advanced Command Line Usage
|
||||
|
||||
PhotonVision exposes some command line options which may be useful for customizing execution on Debian-based installations.
|
||||
|
||||
## Running a JAR File
|
||||
|
||||
Assuming `java` has been installed, and the appropriate environment variables have been set upon installation (a package manager like `apt` should automatically set these), you can use `java -jar` to run a JAR file. If you downloaded the latest stable JAR of PhotonVision from the [GitHub releases page](https://github.com/PhotonVision/photonvision/releases), you can run the following to start the program:
|
||||
|
||||
```bash
|
||||
java -jar /path/to/photonvision/photonvision.jar
|
||||
```
|
||||
|
||||
## Updating a JAR File
|
||||
|
||||
When you need to update your JAR file, run the following:
|
||||
|
||||
```bash
|
||||
wget https://git.io/JqkQ9 -O update.sh
|
||||
sudo chmod +x update.sh
|
||||
sudo ./update.sh
|
||||
sudo reboot now
|
||||
```
|
||||
|
||||
## Creating a `systemd` Service
|
||||
|
||||
You can also create a systemd service that will automatically run on startup. To do so, first navigate to `/lib/systemd/system`. Create a file called `photonvision.service` (or name it whatever you want) using `touch photonvision.service`. Then open this file in the editor of your choice and paste the following text:
|
||||
|
||||
```
|
||||
[Unit]
|
||||
Description=Service that runs PhotonVision
|
||||
|
||||
[Service]
|
||||
WorkingDirectory=/path/to/photonvision
|
||||
# Optional: run photonvision at "nice" -10, which is higher priority than standard
|
||||
# Nice=-10
|
||||
ExecStart=/usr/bin/java -jar /path/to/photonvision/photonvision.jar
|
||||
|
||||
[Install]
|
||||
WantedBy=multi-user.target
|
||||
```
|
||||
|
||||
Then copy the `.service` file to `/etc/systemd/system/` using `cp photonvision.service /etc/systemd/system/photonvision.service`. Then modify the file to have `644` permissions using `chmod 644 /etc/systemd/system/photonvision.service`.
|
||||
|
||||
:::{note}
|
||||
Many ARM processors have a big.LITTLE architecture where some of the CPU cores are more powerful than others. On this type of architecture, you may get more consistent performance by limiting which cores PhotonVision can use. To do this, add the parameter `AllowedCPUs` to the systemd service file in the `[Service]` section.
|
||||
|
||||
For instance, for an Orange Pi 5, cores 4 through 7 are the fast ones, and you can target those cores with the line `AllowedCPUs=4-7`.
|
||||
:::
|
||||
|
||||
## Installing the `systemd` Service
|
||||
|
||||
To install the service, simply run `systemctl enable photonvision.service`.
|
||||
|
||||
:::{note}
|
||||
It is recommended to reload configurations by running `systemctl daemon-reload`.
|
||||
:::
|
||||
@@ -0,0 +1,9 @@
|
||||
{
|
||||
"deviceName" : "Limelight 2+",
|
||||
"supportURL" : "https://limelightvision.io",
|
||||
"ledPins" : [ 13, 18 ],
|
||||
"ledsCanDim" : true,
|
||||
"ledPWMRange" : [ 0, 100 ],
|
||||
"ledPWMFrequency" : 30000,
|
||||
"vendorFOV" : 75.76079874010732
|
||||
}
|
||||
@@ -0,0 +1,7 @@
|
||||
{
|
||||
"deviceName" : "Limelight 2",
|
||||
"supportURL" : "https://limelightvision.io",
|
||||
"ledPins" : [ 17, 18 ],
|
||||
"ledsCanDim" : false,
|
||||
"vendorFOV" : 75.76079874010732
|
||||
}
|
||||
{kind=link}
|
After Width: | Height: | Size: 115 KiB |
{kind=link}
|
After Width: | Height: | Size: 13 KiB |
21
docs/source/docs/advanced-installation/sw_install/index.md
Normal file
@@ -0,0 +1,21 @@
|
||||
# Software Installation
|
||||
|
||||
## Desktop Environments
|
||||
|
||||
```{toctree}
|
||||
:maxdepth: 1
|
||||
|
||||
windows-pc
|
||||
linux-pc
|
||||
mac-os
|
||||
```
|
||||
|
||||
## Other
|
||||
|
||||
```{toctree}
|
||||
:maxdepth: 1
|
||||
|
||||
other-coprocessors
|
||||
advanced-cmd
|
||||
romi
|
||||
```
|
||||
@@ -0,0 +1,47 @@
|
||||
# Linux PC Installation
|
||||
|
||||
PhotonVision may be run on a Debian-based Linux Desktop PC for basic testing and evaluation.
|
||||
|
||||
:::{note}
|
||||
You do not need to install PhotonVision on a Windows PC in order to access the webdashboard (assuming you are using an external coprocessor like a Raspberry Pi).
|
||||
:::
|
||||
|
||||
## Installing Java
|
||||
|
||||
PhotonVision requires a JDK installed and on the system path. JDK 17 is needed (different versions will not work). If you don't have JDK 17 already, run the following to install it:
|
||||
|
||||
```
|
||||
$ sudo apt-get install openjdk-17-jdk
|
||||
```
|
||||
|
||||
:::{warning}
|
||||
Using a JDK other than JDK17 will cause issues when running PhotonVision and is not supported.
|
||||
:::
|
||||
|
||||
## Downloading the Latest Stable Release of PhotonVision
|
||||
|
||||
Go to the [GitHub releases page](https://github.com/PhotonVision/photonvision/releases) and download the relevant .jar file for your coprocessor.
|
||||
|
||||
:::{note}
|
||||
If your coprocessor has a 64 bit ARM based CPU architecture (OrangePi, Raspberry Pi, etc.), download the LinuxArm64.jar file.
|
||||
|
||||
If your coprocessor has an 64 bit x86 based CPU architecture (Mini PC, laptop, etc.), download the Linuxx64.jar file.
|
||||
:::
|
||||
|
||||
:::{warning}
|
||||
Be careful to pick the latest stable release. "Draft" or "Pre-Release" versions are not stable and often have bugs.
|
||||
:::
|
||||
|
||||
## Running PhotonVision
|
||||
|
||||
To run PhotonVision, open a terminal window of your choice and run the following command:
|
||||
|
||||
```
|
||||
$ java -jar /path/to/photonvision/photonvision-xxx.jar
|
||||
```
|
||||
|
||||
If your computer has a compatible webcam connected, PhotonVision should startup without any error messages. If there are error messages, your webcam isn't supported or another issue has occurred. If it is the latter, please open an issue on the [PhotonVision issues page](https://github.com/PhotonVision/photonvision/issues).
|
||||
|
||||
## Accessing the PhotonVision Interface
|
||||
|
||||
Once the Java backend is up and running, you can access the main vision interface by navigating to `localhost:5800` inside your browser.
|
||||
53
docs/source/docs/advanced-installation/sw_install/mac-os.md
Normal file
@@ -0,0 +1,53 @@
|
||||
# Mac OS Installation
|
||||
|
||||
:::{warning}
|
||||
Due to current [cscore](https://github.com/wpilibsuite/allwpilib/tree/main/cscore) restrictions, the PhotonVision server backend may have issues running macOS.
|
||||
:::
|
||||
|
||||
:::{note}
|
||||
You do not need to install PhotonVision on a Mac in order to access the webdashboard (assuming you are using an external coprocessor like a Raspberry Pi).
|
||||
:::
|
||||
|
||||
VERY Limited macOS support is available.
|
||||
|
||||
## Installing Java
|
||||
|
||||
PhotonVision requires a JDK installed and on the system path. JDK 17 is needed (different versions will not work). You may already have this if you have installed WPILib 2025+. If not, [download and install it from here](https://adoptium.net/temurin/releases?version=17).
|
||||
|
||||
:::{warning}
|
||||
Using a JDK other than JDK17 will cause issues when running PhotonVision and is not supported.
|
||||
:::
|
||||
|
||||
## Downloading the Latest Stable Release of PhotonVision
|
||||
|
||||
Go to the [GitHub releases page](https://github.com/PhotonVision/photonvision/releases) and download the relevant .jar file for your coprocessor.
|
||||
|
||||
:::{note}
|
||||
If you have an M1/M2 Mac, download the macarm64.jar file.
|
||||
|
||||
If you have an Intel based Mac, download the macx64.jar file.
|
||||
:::
|
||||
|
||||
:::{warning}
|
||||
Be careful to pick the latest stable release. "Draft" or "Pre-Release" versions are not stable and often have bugs.
|
||||
:::
|
||||
|
||||
## Running PhotonVision
|
||||
|
||||
To run PhotonVision, open a terminal window of your choice and run the following command:
|
||||
|
||||
```
|
||||
$ java -jar /path/to/photonvision/photonvision-xxx.jar
|
||||
```
|
||||
|
||||
:::{warning}
|
||||
Due to current [cscore](https://github.com/wpilibsuite/allwpilib/tree/main/cscore) restrictions, the PhotonVision using test mode is all that is known to work currently.
|
||||
:::
|
||||
|
||||
## Accessing the PhotonVision Interface
|
||||
|
||||
Once the Java backend is up and running, you can access the main vision interface by navigating to `localhost:5800` inside your browser.
|
||||
|
||||
:::{warning}
|
||||
Due to current [cscore](https://github.com/wpilibsuite/allwpilib/tree/main/cscore) restrictions, it is unlikely any streams will open from real webcams.
|
||||
:::
|
||||
@@ -0,0 +1,39 @@
|
||||
# Other Debian-Based Co-Processor Installation
|
||||
|
||||
:::{warning}
|
||||
Working with unsupported coprocessors requires some level of "know how" of your system. The install script has only been tested on Debian/Raspberry Pi OS Buster and Ubuntu Bionic. If any issues arise with your specific OS, please open an issue on our [issues page](https://github.com/PhotonVision/photonvision/issues).
|
||||
:::
|
||||
|
||||
:::{note}
|
||||
We'd love to have your input! If you get PhotonVision working on another coprocessor, consider documenting your steps and submitting a [docs issue](https://github.com/PhotonVision/photonvision-docs/issues)., [pull request](https://github.com/PhotonVision/photonvision-docs/pulls) , or [ping us on Discord](https://discord.com/invite/wYxTwym). For example, Limelight and Romi install instructions came about because someone spent the time to figure it out, and did a writeup.
|
||||
:::
|
||||
|
||||
## Installing PhotonVision
|
||||
|
||||
We provide an [install script](https://git.io/JJrEP) for other Debian-based systems (with `apt`) that will automatically install PhotonVision and make sure that it runs on startup.
|
||||
|
||||
```bash
|
||||
$ wget https://git.io/JJrEP -O install.sh
|
||||
$ sudo chmod +x install.sh
|
||||
$ sudo ./install.sh
|
||||
$ sudo reboot now
|
||||
```
|
||||
|
||||
:::{note}
|
||||
Your co-processor will require an Internet connection for this process to work correctly.
|
||||
:::
|
||||
|
||||
For installation on any other co-processors, we recommend reading the {ref}`advanced command line documentation <docs/advanced-installation/sw_install/advanced-cmd:Advanced Command Line Usage>`.
|
||||
|
||||
## Updating PhotonVision
|
||||
|
||||
PhotonVision can be updated by downloading the latest jar file, copying it onto the processor, and restarting the service.
|
||||
|
||||
For example, from another computer, run the following commands. Substitute the correct username for "\[user\]" ( Provided images use username "pi")
|
||||
|
||||
```bash
|
||||
$ scp [jar name].jar [user]@photonvision.local:~/
|
||||
$ ssh [user]@photonvision.local
|
||||
$ sudo mv [jar name].jar /opt/photonvision/photonvision.jar
|
||||
$ sudo systemctl restart photonvision.service
|
||||
```
|
||||
43
docs/source/docs/advanced-installation/sw_install/romi.md
Normal file
@@ -0,0 +1,43 @@
|
||||
# Romi Installation
|
||||
|
||||
The [Romi](https://docs.wpilib.org/en/latest/docs/romi-robot/index.html) is a small robot that can be controlled with the WPILib software. The main controller is a Raspberry Pi that must be imaged with [WPILibPi](https://docs.wpilib.org/en/latest/docs/romi-robot/imaging-romi.html) .
|
||||
|
||||
## Installation
|
||||
|
||||
The WPILibPi image includes FRCVision, which reserves USB cameras; to use PhotonVision, we need to edit the `/home/pi/runCamera` script to disable it. First we will need to make the file system writeable; the easiest way to do this is to go to `10.0.0.2` and choose "Writable" at the top.
|
||||
|
||||
SSH into the Raspberry Pi (using Windows command line, or a tool like [Putty](https://www.chiark.greenend.org.uk/~sgtatham/putty/) ) at the Romi's default address `10.0.0.2`. The default user is `pi`, and the password is `raspberry`.
|
||||
|
||||
:::.. The following paragraph can be restored when WPILibPi becomes compatible with the current version of PhotonVision.
|
||||
:::.. Follow the process for installing PhotonVision on {ref}`"Other Debian-Based Co-Processor Installation" <docs/advanced-installation/sw_install/other-coprocessors:Other Debian-Based Co-Processor Installation>`. As it mentions, this will require an internet connection so connecting the Raspberry Pi to an internet-connected router via an Ethernet cable will be the easiest solution. The pi must remain writable while you are following these steps!
|
||||
|
||||
:::..Temporary instructions explaining how to install the older version of PhotonVision on a Romi. Remove when no longer needed.
|
||||
:::{attention}
|
||||
The version of WPILibPi for the Romi is 2023.2.1, which is not compatible with the current version of PhotonVision. **If you are using WPILibPi 2023.2.1 on your Romi, you must install PhotonVision v2023.4.2 or earlier!**
|
||||
|
||||
To install a compatible version of PhotonVision, enter these commands in the SSH terminal connected to the Raspberry Pi. This will download and run the install script, which will intall PhotonVision on your Raspberry Pi and configure it to run at startup.
|
||||
|
||||
```bash
|
||||
$ wget https://git.io/JJrEP -O install.sh
|
||||
$ sudo chmod +x install.sh
|
||||
$ sudo ./install.sh -v 2023.4.2
|
||||
```
|
||||
The install script requires an internet connection, so connecting the Raspberry Pi to an internet-connected router via an Ethernet cable will be the easiest solution. The pi must remain writable while you are following these steps!
|
||||
:::
|
||||
:::..End of temporary instructions.
|
||||
|
||||
Next, from the SSH terminal, run `sudo nano /home/pi/runCamera` then arrow down to the start of the exec line and press "Enter" to add a new line. Then add `#` before the exec command to comment it out. Then, arrow up to the new line and type `sleep 10000`. Hit "Ctrl + O" and then "Enter" to save the file. Finally press "Ctrl + X" to exit nano. Now, reboot the Romi by typing `sudo reboot now`.
|
||||
|
||||
```{image} images/nano.png
|
||||
|
||||
```
|
||||
|
||||
After the Romi reboots, you should be able to open the PhotonVision UI at: [`http://10.0.0.2:5800/`](http://10.0.0.2:5800/). From here, you can adjust settings and configure {ref}`Pipelines <docs/pipelines/index:Pipelines>`.
|
||||
|
||||
:::{warning}
|
||||
In order for settings, logs, etc. to be saved / take effect, ensure that PhotonVision is in writable mode.
|
||||
:::
|
||||
|
||||
:::{attention}
|
||||
When using an older version of PhotonVision, the user interface and features may be different than what appears in the online documentation. The [Documentation](http://10.0.0.2:5800/#/docs) link in the User Interface will open a bundled version of the documentation that matches the PhotonVision version running on your coprocessor.
|
||||
:::
|
||||
@@ -0,0 +1,45 @@
|
||||
# Windows PC Installation
|
||||
|
||||
PhotonVision may be run on a Windows Desktop PC for basic testing and evaluation.
|
||||
|
||||
:::{note}
|
||||
You do not need to install PhotonVision on a Windows PC in order to access the webdashboard (assuming you are using an external coprocessor like a Raspberry Pi).
|
||||
:::
|
||||
|
||||
## Install Bonjour
|
||||
|
||||
Bonjour provides more stable networking when using Windows PCs. Install [Bonjour here](https://support.apple.com/downloads/DL999/en_US/BonjourPSSetup.exe) before continuing to ensure a stable experience while using PhotonVision.
|
||||
|
||||
## Installing Java
|
||||
|
||||
PhotonVision requires a JDK installed and on the system path. **JDK 17 is needed. Windows Users must use the JDK that ships with WPILib.** [Download and install it from here.](https://github.com/wpilibsuite/allwpilib/releases/tag/v2025.2.1) Either ensure the only Java on your PATH is the WPILIB Java or specify it to gradle with `-Dorg.gradle.java.home=C:\Users\Public\wpilib\2025\jdk`:
|
||||
|
||||
```
|
||||
> ./gradlew run "-Dorg.gradle.java.home=C:\Users\Public\wpilib\2025\jdk"
|
||||
```
|
||||
|
||||
:::{warning}
|
||||
Using a JDK other than WPILIB's JDK17 will cause issues when running PhotonVision and is not supported.
|
||||
:::
|
||||
|
||||
## Downloading the Latest Stable Release of PhotonVision
|
||||
|
||||
Go to the [GitHub releases page](https://github.com/PhotonVision/photonvision/releases) and download the winx64.jar file.
|
||||
|
||||
## Running PhotonVision
|
||||
|
||||
To run PhotonVision, open a terminal window of your choice and run the following command:
|
||||
|
||||
```
|
||||
> java -jar C:\path\to\photonvision\NAME OF JAR FILE GOES HERE.jar
|
||||
```
|
||||
|
||||
If your computer has a compatible webcam connected, PhotonVision should startup without any error messages. If there are error messages, your webcam isn't supported or another issue has occurred. If it is the latter, please open an issue on the [PhotonVision issues page](https://github.com/PhotonVision/photonvision/issues).
|
||||
|
||||
:::{warning}
|
||||
Using an integrated laptop camera may cause issues when trying to run PhotonVision. If you are unable to run PhotonVision on a laptop with an integrated camera, try disabling the camera's driver in Windows Device Manager.
|
||||
:::
|
||||
|
||||
## Accessing the PhotonVision Interface
|
||||
|
||||
Once the Java backend is up and running, you can access the main vision interface by navigating to `localhost:5800` inside your browser.
|
||||
56
docs/source/docs/apriltag-pipelines/2D-tracking-tuning.md
Normal file
@@ -0,0 +1,56 @@
|
||||
# 2D AprilTag Tuning / Tracking
|
||||
|
||||
## Tracking AprilTags
|
||||
|
||||
Before you get started tracking AprilTags, ensure that you have followed the previous sections on installation, wiring and networking. Next, open the Web UI, go to the top right card, and switch to the "AprilTag" or "Aruco" type. You should see a screen similar to the one below.
|
||||
|
||||
```{image} images/apriltag.png
|
||||
:align: center
|
||||
```
|
||||
|
||||
You are now able to detect and track AprilTags in 2D (yaw, pitch, roll, etc.). In order to get 3D data from your AprilTags, please see {ref}`here. <docs/apriltag-pipelines/3D-tracking:3D Tracking>`
|
||||
|
||||
## Tuning AprilTags
|
||||
|
||||
AprilTag pipelines come with reasonable defaults to get you up and running with tracking. However, in order to optimize your performance and accuracy, you must tune your AprilTag pipeline using the settings below. Note that the settings below are different between the AprilTag and Aruco detectors but the concepts are the same.
|
||||
|
||||
```{image} images/apriltag-tune.png
|
||||
:align: center
|
||||
:scale: 45 %
|
||||
```
|
||||
|
||||
### Target Family
|
||||
|
||||
Target families are defined by two numbers (before and after the h). The first number is the number of bits the tag is able to encode (which means more tags are available in the respective family) and the second is the hamming distance. Hamming distance describes the ability for error correction while identifying tag ids. A high hamming distance generally means that it will be easier for a tag to be identified even if there are errors. However, as hamming distance increases, the number of available tags decreases.
|
||||
|
||||
The 2025 FRC game will be using 36h11 tags, which can be found [here](https://github.com/AprilRobotics/apriltag-imgs/tree/main/tag36h11).
|
||||
|
||||
### Decimate
|
||||
|
||||
Decimation (also known as down-sampling) is the process of reducing the sampling frequency of a signal (in our case, the image). Increasing decimate will lead to an increased detection rate while decreasing detection distance. We recommend keeping this at the default value.
|
||||
|
||||
### Blur
|
||||
|
||||
This controls the sigma of Gaussian blur for tag detection. In clearer terms, increasing blur will make the image blurrier, decreasing it will make it closer to the original image. We strongly recommend that you keep blur to a minimum (0) due to it's high performance intensity unless you have an extremely noisy image.
|
||||
|
||||
### Threads
|
||||
|
||||
Threads refers to the threads within your coprocessor's CPU. The theoretical maximum is device dependent, but we recommend that users to stick to one less than the amount of CPU threads that your coprocessor has. Increasing threads will increase performance at the cost of increased CPU load, temperature increase, etc. It may take some experimentation to find the most optimal value for your system.
|
||||
|
||||
### Refine Edges
|
||||
|
||||
The edges of the each polygon are adjusted to "snap to" high color differences surrounding it. It is recommended to use this in tandem with decimate as it can increase the quality of the initial estimate.
|
||||
|
||||
### Pose Iterations
|
||||
|
||||
Pose iterations represents the amount of iterations done in order for the AprilTag algorithm to converge on its pose solution(s). A smaller number between 0-100 is recommended. A smaller amount of iterations cause a more noisy set of poses when looking at the tag straight on, while higher values much more consistently stick to a (potentially wrong) pair of poses. WPILib contains many useful filter classes in order to account for a noisy tag reading.
|
||||
|
||||
### Max Error Bits
|
||||
|
||||
Max error bits, also known as hamming distance, is the number of positions at which corresponding pieces of data / tag are different. Put more generally, this is the number of bits (think of these as squares in the tag) that need to be changed / corrected in the tag to correctly detect it. A higher value means that more tags will be detected while a lower value cuts out tags that could be "questionable" in terms of detection.
|
||||
|
||||
We recommend a value of 0 for the 16h5 and at most 3 for the 36h11 family.
|
||||
|
||||
### Decision Margin Cutoff
|
||||
|
||||
The decision margin cutoff is how much “margin” the detector has left before it rejects a tag; increasing this rejects poorer tags. We recommend you keep this value around a 30.
|
||||
13
docs/source/docs/apriltag-pipelines/3D-tracking.md
Normal file
@@ -0,0 +1,13 @@
|
||||
# 3D Tracking
|
||||
|
||||
3D AprilTag tracking will allow you to track the real-world position and rotation of a tag relative to the camera's image sensor. This is useful for robot pose estimation and other applications like autonomous scoring. In order to use 3D tracking, you must first {ref}`calibrate your camera <docs/calibration/calibration:Calibrating Your Camera>`. Once you have, you need to enable 3D mode in the UI and you will now be able to get 3D pose information from the tag! For information on getting and using this information in your code, see {ref}`the programming reference. <docs/programming/index:Programming Reference>`.
|
||||
|
||||
## Ambiguity
|
||||
|
||||
Translating from 2D to 3D using data from the calibration and the four tag corners can lead to "pose ambiguity", where it appears that the AprilTag pose is flipping between two different poses. You can read more about this issue `here. <https://docs.wpilib.org/en/stable/docs/software/vision-processing/apriltag/apriltag-intro.html#d-to-3d-ambiguity>` Ambiguity is calculated as the ratio of reprojection errors between two pose solutions (if they exist), where reprojection error is the error corresponding to the image distance between where the apriltag's corners are detected vs where we expect to see them based on the tag's estimated camera relative pose.
|
||||
|
||||
There are a few steps you can take to resolve/mitigate this issue:
|
||||
|
||||
1. Mount cameras at oblique angles so it is less likely that the tag will be seen straight on.
|
||||
2. Use the {ref}`MultiTag system <docs/apriltag-pipelines/multitag:MultiTag Localization>` in order to combine the corners from multiple tags to get a more accurate and unambiguous pose.
|
||||
3. Reject all tag poses where the ambiguity ratio (available via PhotonLib) is greater than 0.2.
|
||||
14
docs/source/docs/apriltag-pipelines/about-apriltags.md
Normal file
@@ -0,0 +1,14 @@
|
||||
# About AprilTags
|
||||
|
||||
```{image} images/pv-apriltag.png
|
||||
:align: center
|
||||
:scale: 20 %
|
||||
```
|
||||
|
||||
AprilTags are a common type of visual fiducial marker. Visual fiducial markers are artificial landmarks added to a scene to allow "localization" (finding your current position) via images. In simpler terms, tags mark known points of reference that you can use to find your current location. They are similar to QR codes in which they encode information, however, they hold only a single number. By placing AprilTags in known locations around the field and detecting them using PhotonVision, you can easily get full field localization / pose estimation. Alternatively, you can use AprilTags the same way you used retroreflective tape, simply using them to turn to goal without any pose estimation.
|
||||
|
||||
A more technical explanation can be found in the [WPILib documentation](https://docs.wpilib.org/en/latest/docs/software/vision-processing/apriltag/apriltag-intro.html).
|
||||
|
||||
:::{note}
|
||||
You can get FIRST's [official PDF of the targets used in 2025 here](https://firstfrc.blob.core.windows.net/frc2025/FieldAssets/Apriltag_Images_and_User_Guide.pdf).
|
||||
:::
|
||||
40
docs/source/docs/apriltag-pipelines/coordinate-systems.md
Normal file
@@ -0,0 +1,40 @@
|
||||
# Coordinate Systems
|
||||
|
||||
## Field and Robot Coordinate Frame
|
||||
|
||||
PhotonVision follows the WPILib conventions for the robot and field coordinate systems, as defined [here](https://docs.wpilib.org/en/stable/docs/software/advanced-controls/geometry/coordinate-systems.html).
|
||||
|
||||
You define the camera to robot transform in the robot coordinate frame.
|
||||
|
||||
## Camera Coordinate Frame
|
||||
|
||||
OpenCV by default uses x-left/y-down/z-out for camera transforms. PhotonVision applies a base rotation to this transformation to make robot to tag transforms more in line with the WPILib coordinate system. The x, y, and z axes are also shown in red, green, and blue in the 3D mini-map and targeting overlay in the UI.
|
||||
|
||||
- The origin is the focal point of the camera lens
|
||||
- The x-axis points out of the camera
|
||||
- The y-axis points to the left
|
||||
- The z-axis points upwards
|
||||
|
||||
```{image} images/camera-coord.png
|
||||
:align: center
|
||||
:scale: 45 %
|
||||
```
|
||||
|
||||
```{image} images/multiple-tags.png
|
||||
:align: center
|
||||
:scale: 45 %
|
||||
```
|
||||
|
||||
## AprilTag Coordinate Frame
|
||||
|
||||
The AprilTag coordinate system is defined as follows, relative to the center of the AprilTag itself, and when viewing the tag as a robot would. Again, PhotonVision changes this coordinate system to be more in line with WPILib. This means that a robot facing a tag head-on would see a robot-to-tag transform with a translation only in x, and a rotation of 180 degrees about z. The tag coordinate system is also shown with x/y/z in red/green/blue in the UI target overlay and mini-map.
|
||||
|
||||
- The origin is the center of the tag
|
||||
- The x-axis is normal to the plane the tag is printed on, pointing outward from the visible side of the tag.
|
||||
- The y-axis points to the right
|
||||
- The z-axis points upwards
|
||||
|
||||
```{image} images/apriltag-coords.png
|
||||
:align: center
|
||||
:scale: 45 %
|
||||
```
|
||||
15
docs/source/docs/apriltag-pipelines/detector-types.md
Normal file
@@ -0,0 +1,15 @@
|
||||
# AprilTag Pipeline Types
|
||||
|
||||
PhotonVision offers two different AprilTag pipeline types based on different implementations of the underlying algorithm. Each one has its advantages / disadvantages, which are detailed below.
|
||||
|
||||
:::{note}
|
||||
Note that both of these pipeline types detect AprilTag markers and are just two different algorithms for doing so.
|
||||
:::
|
||||
|
||||
## AprilTag
|
||||
|
||||
The AprilTag pipeline type is based on the [AprilTag](https://april.eecs.umich.edu/software/apriltag.html) library from the University of Michigan and we recommend it for most use cases. It is (to our understanding) most accurate pipeline type, but is also ~2x slower than AruCo. This was the pipeline type used by teams in the 2023 season and is well tested.
|
||||
|
||||
## AruCo
|
||||
|
||||
The AruCo pipeline is based on the [AruCo](https://docs.opencv.org/4.8.0/d9/d6a/group__aruco.html) library implementation from OpenCV. It is ~2x higher fps and ~2x lower latency than the AprilTag pipeline type, but is less accurate. We recommend this pipeline type for teams that need to run at a higher framerate or have a lower powered device. This pipeline type was new for the 2024 season.
|
||||
BIN
docs/source/docs/apriltag-pipelines/images/apriltag-coords.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 55 KiB |
BIN
docs/source/docs/apriltag-pipelines/images/apriltag-tune.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 51 KiB |
BIN
docs/source/docs/apriltag-pipelines/images/apriltag.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 99 KiB |
BIN
docs/source/docs/apriltag-pipelines/images/camera-coord.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 74 KiB |
BIN
docs/source/docs/apriltag-pipelines/images/field-layout.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 105 KiB |
BIN
docs/source/docs/apriltag-pipelines/images/multiple-tags.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 427 KiB |
BIN
docs/source/docs/apriltag-pipelines/images/multitag-ui.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 451 KiB |
BIN
docs/source/docs/apriltag-pipelines/images/pv-apriltag.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 10 KiB |
10
docs/source/docs/apriltag-pipelines/index.md
Normal file
@@ -0,0 +1,10 @@
|
||||
# AprilTag Detection
|
||||
|
||||
```{toctree}
|
||||
about-apriltags
|
||||
detector-types
|
||||
2D-tracking-tuning
|
||||
3D-tracking
|
||||
multitag
|
||||
coordinate-systems
|
||||
```
|
||||
65
docs/source/docs/apriltag-pipelines/multitag.md
Normal file
@@ -0,0 +1,65 @@
|
||||
# MultiTag Localization
|
||||
|
||||
PhotonVision can combine AprilTag detections from multiple simultaneously observed AprilTags from a particular camera with information about where tags are expected to be located on the field to produce a better estimate of where the camera (and therefore robot) is located on the field. PhotonVision can calculate this multi-target result on your coprocessor, reducing CPU usage on your RoboRio. This result is sent over NetworkTables along with other detected targets as part of the `PhotonPipelineResult` provided by PhotonLib.
|
||||
|
||||
:::{warning}
|
||||
MultiTag requires an accurate field layout JSON to be uploaded! Differences between this layout and the tags' physical location will drive error in the estimated pose output.
|
||||
:::
|
||||
|
||||
## Enabling MultiTag
|
||||
|
||||
Ensure that your camera is calibrated and 3D mode is enabled. Navigate to the Output tab and enable "Do Multi-Target Estimation". This enables MultiTag to use the uploaded field layout JSON to calculate your camera's pose in the field. This 3D transform will be shown as an additional table in the "targets" tab, along with the IDs of AprilTags used to compute this transform.
|
||||
|
||||
```{image} images/multitag-ui.png
|
||||
:alt: Multitarget enabled and running in the PhotonVision UI
|
||||
:width: 600
|
||||
```
|
||||
|
||||
:::{note}
|
||||
By default, enabling multi-target will disable calculating camera-to-target transforms for each observed AprilTag target to increase performance; the X/Y/angle numbers shown in the target table of the UI are instead calculated using the tag's expected location (per the field layout JSON) and the field-to-camera transform calculated using MultiTag. If you additionally want the individual camera-to-target transform calculated using SolvePNP for each target, enable "Always Do Single-Target Estimation".
|
||||
:::
|
||||
|
||||
This multi-target pose estimate can be accessed using PhotonLib. We suggest using {ref}`the PhotonPoseEstimator class <docs/programming/photonlib/robot-pose-estimator:AprilTags and PhotonPoseEstimator>` with the `MULTI_TAG_PNP_ON_COPROCESSOR` strategy to simplify code, but the transform can be directly accessed using `getMultiTagResult`/`MultiTagResult()` (Java/C++).
|
||||
|
||||
```{eval-rst}
|
||||
.. tab-set-code::
|
||||
|
||||
.. code-block:: Java
|
||||
|
||||
var result = camera.getLatestResult();
|
||||
if (result.getMultiTagResult().estimatedPose.isPresent) {
|
||||
Transform3d fieldToCamera = result.getMultiTagResult().estimatedPose.best;
|
||||
}
|
||||
|
||||
|
||||
.. code-block:: C++
|
||||
|
||||
auto result = camera.GetLatestResult();
|
||||
if (result.MultiTagResult().result.isPresent) {
|
||||
frc::Transform3d fieldToCamera = result.MultiTagResult().result.best;
|
||||
}
|
||||
|
||||
.. code-block:: Python
|
||||
|
||||
# Coming Soon!
|
||||
|
||||
```
|
||||
|
||||
:::{note}
|
||||
The returned field to camera transform is a transform from the fixed field origin to the camera's coordinate system. This does not change based on alliance color, and by convention is on the BLUE ALLIANCE wall.
|
||||
:::
|
||||
|
||||
## Updating the Field Layout
|
||||
|
||||
PhotonVision ships by default with the [2025 field layout JSON](https://github.com/wpilibsuite/allwpilib/blob/main/apriltag/src/main/native/resources/edu/wpi/first/apriltag/2025-reefscape.json). The layout can be inspected by navigating to the settings tab and scrolling down to the "AprilTag Field Layout" card, as shown below.
|
||||
|
||||
```{image} images/field-layout.png
|
||||
:alt: The currently saved field layout in the Photon UI
|
||||
:width: 600
|
||||
```
|
||||
|
||||
An updated field layout can be uploaded by navigating to the "Device Control" card of the Settings tab and clicking "Import Settings". In the pop-up dialog, select the "AprilTag Layout" type and choose an updated layout JSON (in the same format as the WPILib field layout JSON linked above) using the paperclip icon, and select "Import Settings". The AprilTag layout in the "AprilTag Field Layout" card below should be updated to reflect the new layout.
|
||||
|
||||
:::{note}
|
||||
Currently, there is no way to update this layout using PhotonLib, although this feature is under consideration.
|
||||
:::
|
||||
BIN
docs/source/docs/assets/AprilTag16h5.pdf
Normal file
BIN
docs/source/docs/assets/settings.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 143 KiB |
147
docs/source/docs/calibration/calibration.md
Normal file
@@ -0,0 +1,147 @@
|
||||
# Calibrating Your Camera
|
||||
|
||||
:::{important}
|
||||
In order to detect AprilTags and use 3D mode, your camera must be calibrated at the desired resolution! Inaccurate calibration will lead to poor performance.
|
||||
:::
|
||||
|
||||
To calibrate a camera, images of a Charuco board (or chessboard) are taken. By comparing where the grid corners should be in object space (for example, a corner once every inch in an 8x6 grid) with where they appear in the camera image, we can find a least-squares estimate for intrinsic camera properties like focal lengths, center point, and distortion coefficients. For more on camera calibration, please review the [OpenCV documentation](https://docs.opencv.org/4.x/dc/dbb/tutorial_py_calibration.html).
|
||||
|
||||
:::{warning}
|
||||
While any resolution can be calibrated, higher resolutions may be too performance-intensive for some coprocessors to handle. Therefore, we recommend experimenting to see what works best for your coprocessor.
|
||||
:::
|
||||
|
||||
:::{note}
|
||||
The calibration data collected during calibration is specific to each physical camera, as well as each individual resolution.
|
||||
:::
|
||||
|
||||
## Calibration Tips
|
||||
|
||||
Accurate camera calibration is required in order to get accurate pose measurements when using AprilTags and 3D mode. The tips below should help ensure success:
|
||||
|
||||
01. Ensure your the images you take have the target in different positions and angles, with as big of a difference between angles as possible. It is important to make sure the target overlay still lines up with the board while doing this. Tilt no more than 45 degrees.
|
||||
02. Use as big of a calibration target as your printer can print.
|
||||
03. Ensure that your printed pattern has enough white border around it.
|
||||
04. Ensure your camera stays in one position during the duration of the calibration.
|
||||
05. Make sure you get all 12 images from varying distances and angles.
|
||||
06. Take at least one image that covers the total image area, and generally ensure that you get even coverage of the lens with your image set.
|
||||
07. Have good lighting, having a diffusely lit target would be best (light specifically shining on the target without shadows).
|
||||
08. Ensure the calibration target is completely flat and does not bend or fold in any way. It should be mounted/taped down to something flat and then used for calibration, do not just hold it up.
|
||||
09. Avoid having targets that are parallel to the lens of the camera / straight on towards the camera as much as possible. You want angles and variations within your calibration images.
|
||||
|
||||
Following the ideas above should help in getting an accurate calibration.
|
||||
|
||||
## Calibrating using PhotonVision
|
||||
|
||||
### 1. Navigate to the calibration section in the UI.
|
||||
|
||||
The Cameras tab of the UI houses PhotonVision's camera calibration tooling. It assists users with calibrating their cameras, as well as allows them to view previously calibrated resolutions. We support both charuco and chessboard calibrations.
|
||||
|
||||
### 2. Print out the calibration target.
|
||||
|
||||
In the Camera Calibration tab, we'll print out the calibration target using the "Download" button. This should be printed on 8.5x11 printer paper. This page shows using an 8x8 charuco board (or chessboard depending on the selected calibration type).
|
||||
|
||||
:::{warning}
|
||||
Ensure that there is no scaling applied during printing (it should be at 100%) and that the PDF is printed as is on regular printer paper. Check the square size with calipers or an accurate measuring device after printing to ensure squares are sized properly, and enter the true size of the square in the UI text box. For optimal results, various resources are available online to calibrate your specific printer if needed.
|
||||
:::
|
||||
|
||||
### 3. Select calibration resolution and fill in appropriate target data.
|
||||
|
||||
We'll next select a resolution to calibrate and populate our pattern spacing, marker size, and board size. The provided chessboard and charuco board are an 8x8 grid of 1 inch square. The provided charuco board uses the 4x4 dictionary with a marker size of 0.75 inches (this board does not need the old OpenCV pattern selector selected). Printers are not perfect, and you need to measure your calibration target and enter the correct marker size (size of the aruco marker) and pattern spacing (aka size of the black square) using calipers or similar. Finally, once our entered data is correct, we'll click "start calibration."
|
||||
|
||||
:::{warning} Old OpenCV Pattern selector. This should be used in the case that the calibration image is generated from a version of OpenCV before version 4.6.0. This would include targets created by calib.io. If this selector is not set correctly the calibration will be completely invalid. For more info view [this GitHub issue](https://github.com/opencv/opencv_contrib/issues/3291).
|
||||
:::
|
||||
|
||||
### 4. Take at calibration images from various angles.
|
||||
|
||||
Now, we'll capture images of our board from various angles. It's important to check that the board overlay matches the board in your image. The further the overdrawn points are from the true position of the chessboard corners, the less accurate the final calibration will be. We'll want to capture enough images to cover the whole camera's FOV (with a minimum of 12). Once we've got our images, we'll click "Finish calibration" and wait for the calibration process to complete. If all goes well, the mean error and FOVs will be shown in the table on the right. The FOV should be close to the camera's specified FOV (usually found in a datasheet) usually within + or - 10 degrees. The mean error should also be low, usually less than 1 pixel.
|
||||
|
||||
```{raw} html
|
||||
<video width="85%" controls>
|
||||
<source src="../../_static/assets/calibration_small.mp4" type="video/mp4">
|
||||
Your browser does not support the video tag.
|
||||
</video>
|
||||
```
|
||||
|
||||
## Accessing Calibration Images
|
||||
|
||||
Details about a particular calibration can be viewed by clicking on that resolution in the calibrations tab. This tab allows you to download raw calibration data, upload a previous calibration, and inspect details about calculated camera intrinsic.
|
||||
|
||||
```{image} images/cal-details.png
|
||||
:alt: Captured calibration images
|
||||
:width: 600
|
||||
```
|
||||
|
||||
:::{note}
|
||||
More info on what these parameters mean can be found in [OpenCV's docs](https://docs.opencv.org/4.8.0/d4/d94/tutorial_camera_calibration.html)
|
||||
:::
|
||||
|
||||
- Fx/Fy: Estimated camera focal length, in mm
|
||||
- Fx/Cy: Estimated camera optical center, in pixels. This should be at about the center of the image
|
||||
- Distortion: OpenCV camera model distortion coefficients
|
||||
- FOV: calculated using estimated focal length and image size. Useful for gut-checking calibration results
|
||||
- Mean Err: Mean reprojection error, or distance between expected and observed chessboard cameras for the full calibration dataset
|
||||
|
||||
Below these outputs are the snapshots collected for calibration, along with a per-snapshot mean reprojection error. A snapshot with a larger reprojection error might indicate a bad snapshot, due to effects such as motion blur or misidentified chessboard corners.
|
||||
|
||||
Calibration images can also be extracted from the downloaded JSON file using [this Python script](https://raw.githubusercontent.com/PhotonVision/photonvision/main/devTools/calibrationUtils.py). This script will unpack calibration images, and also generate a VNL file for use [with mrcal](https://mrcal.secretsauce.net/).
|
||||
|
||||
```
|
||||
python3 /path/to/calibrationUtils.py path/to/photon_calibration.json /path/to/output/folder
|
||||
```
|
||||
|
||||
```{image} images/unpacked-json.png
|
||||
:alt: Captured calibration images
|
||||
:width: 600
|
||||
```
|
||||
|
||||
## Investigating Calibration Data with mrcal
|
||||
|
||||
[mrcal](https://mrcal.secretsauce.net/tour.html) is a command-line tool for camera calibration and visualization. PhotonVision has the option to use the mrcal backend during camera calibration to estimate intrinsics. mrcal can also be used post-calibration to inspect snapshots and provide feedback. These steps will closely follow the [mrcal tour](https://mrcal.secretsauce.net/tour-initial-calibration.html) -- I'm aggregating commands and notes here, but the mrcal documentation is much more thorough.
|
||||
|
||||
Start by [Installing mrcal](https://mrcal.secretsauce.net/install.html). Note that while mrcal *calibration* using PhotonVision is supported on all platforms, but investigation right now only works on Linux. Some users have also reported luck using [WSL 2 on Windows](https://learn.microsoft.com/en-us/windows/wsl/tutorials/gui-apps) as well. You may also need to install `feedgnuplot`. On Ubuntu systems, these commands should be run from a standalone terminal and *not* the one [built into vscode](https://github.com/ros2/ros2/issues/1406).
|
||||
|
||||
Let's run `calibrationUtils.py` as described above, and then cd into the output folder. From here, you can follow the mrcal tour, just replacing the VNL filename and camera imager size as necessary. My camera calibration was at 1280x720, so I've set the XY limits to that below.
|
||||
|
||||
```
|
||||
$ cd /path/to/output/folder
|
||||
$ ls
|
||||
matt@photonvision:~/Documents/Downloads/2024-01-02_lifecam_1280$ ls
|
||||
corners.vnl img0.png img10.png img11.png img12.png img13.png img1.png
|
||||
img2.png img3.png img4.png img5.png img6.png img7.png img8.png
|
||||
img9.png cameramodel_0.cameramodel
|
||||
|
||||
$ < corners.vnl \
|
||||
vnl-filter -p x,y | \
|
||||
feedgnuplot --domain --square --set 'xrange [0:1280] noextend' --set 'yrange [720:0] noextend'
|
||||
```
|
||||
|
||||
```{image} images/mrcal-coverage.svg
|
||||
:alt: A diagram showing the locations of all detected chessboard corners.
|
||||
```
|
||||
|
||||
As you can see, we didn't do a fantastic job of covering our whole camera sensor -- there's a big gap across the whole right side, for example. We also only have 14 calibration images. We've also got our "cameramodel" file, which can be used by mrcal to display additional debug info.
|
||||
|
||||
Let's inspect our reprojection error residuals. We expect their magnitudes and directions to be random -- if there's patterns in the colors shown, then our calibration probably doesn't fully explain our physical camera sensor.
|
||||
|
||||
```
|
||||
$ mrcal-show-residuals --magnitudes --set 'cbrange [0:1.5]' ./camera-0.cameramodel
|
||||
$ mrcal-show-residuals --directions --unset key ./camera-0.cameramodel
|
||||
```
|
||||
|
||||
```{image} images/residual-magnitudes.svg
|
||||
:alt: A diagram showing residual magnitudes
|
||||
```
|
||||
|
||||
```{image} images/residual-directions.svg
|
||||
:alt: A diagram showing residual directions
|
||||
```
|
||||
|
||||
Clearly we don't have anywhere near enough data to draw any meaningful conclusions (yet). But for fun, let's dig into [camera uncertainty estimation](https://mrcal.secretsauce.net/tour-uncertainty.html). This diagram shows how expected projection error changes due to noise in calibration inputs. Lower projection error across a larger area of the sensor imply a better calibration that more fully covers the whole sensor. For my calibration data, you can tell the projection error isolines (lines of constant expected projection error) are skewed to the left, following my dataset (which was also skewed left).
|
||||
|
||||
```
|
||||
$ mrcal-show-projection-uncertainty --unset key ./cameramodel_0.cameramodel
|
||||
```
|
||||
|
||||
```{image} images/camera-uncertainty.svg
|
||||
:alt: A diagram showing camera uncertainty
|
||||
```
|
||||
BIN
docs/source/docs/calibration/images/cal-details.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 462 KiB |
6201
docs/source/docs/calibration/images/camera-uncertainty.svg
Normal file
{kind=link}
|
After Width: | Height: | Size: 341 KiB |
10773
docs/source/docs/calibration/images/mrcal-coverage.svg
Normal file
{kind=link}
|
After Width: | Height: | Size: 600 KiB |
10306
docs/source/docs/calibration/images/residual-directions.svg
Normal file
{kind=link}
|
After Width: | Height: | Size: 519 KiB |
10360
docs/source/docs/calibration/images/residual-magnitudes.svg
Normal file
{kind=link}
|
After Width: | Height: | Size: 522 KiB |
BIN
docs/source/docs/calibration/images/unpacked-json.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 163 KiB |
BIN
docs/source/docs/contributing/assets/git-download.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 92 KiB |
BIN
docs/source/docs/contributing/assets/vscode-gradle-args.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 87 KiB |
BIN
docs/source/docs/contributing/assets/vscode-gradle-tests.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 42 KiB |
BIN
docs/source/docs/contributing/assets/vscode-runner-tests.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 334 KiB |
33
docs/source/docs/contributing/building-docs.md
Normal file
@@ -0,0 +1,33 @@
|
||||
# Building the PhotonVision Documentation
|
||||
|
||||
To build the PhotonVision documentation, you will require [Git](https://git-scm.com) and [Python 3.6 or greater](https://www.python.org).
|
||||
|
||||
## Cloning the Documentation Repository
|
||||
|
||||
Documentation lives within the main PhotonVision repository within the `docs` sub-folder. If you are planning on contributing, it is recommended to create a fork of the [PhotonVision repository](https://github.com/PhotonVision/photonvision). To clone this fork, run the following command in a terminal window:
|
||||
|
||||
`git clone https://github.com/[your username]/photonvision`
|
||||
|
||||
## Installing Python Dependencies
|
||||
|
||||
You must install a set of Python dependencies in order to build the documentation. To do so, you can run the following command in the docs sub-folder:
|
||||
|
||||
`~/photonvision/docs$ python -m pip install -r requirements.txt`
|
||||
|
||||
## Building the Documentation
|
||||
|
||||
In order to build the documentation, you can run the following command in the docs sub-folder. This will automatically build docs every time a file changes, and serves them locally at `localhost:8000` by default.
|
||||
|
||||
`~/photonvision/docs$ sphinx-autobuild --open-browser source source/_build/html`
|
||||
|
||||
## Opening the Documentation
|
||||
|
||||
The built documentation is located at `docs/build/html/index.html` relative to the root project directory, or can be accessed via the local web server if using sphinx-autobuild.
|
||||
|
||||
## Docs Builds on Pull Requests
|
||||
|
||||
Pre-merge builds of docs can be found at: `https://photonvision-docs--PRNUMBER.org.readthedocs.build/en/PRNUMBER/index.html`. These docs are republished on every commit to a pull request made to PhotonVision/photonvision-docs. For example, PR 325 would have pre-merge documentation published to `https://photonvision-docs--325.org.readthedocs.build/en/325/index.html`. Additionally, the pull request will have a link directly to the pre-release build of the docs. This build only runs when there is a change to files in the docs sub-folder.
|
||||
|
||||
## Style Guide
|
||||
|
||||
PhotonVision follows the frc-docs style guide which can be found [here](https://docs.wpilib.org/en/stable/docs/contributing/style-guide.html). In order to run the linter locally (which builds on doc8 and checks for compliance with the style guide), follow the instructions [on GitHub](https://github.com/wpilibsuite/ohnoyoudidnt).
|
||||
275
docs/source/docs/contributing/building-photon.md
Normal file
@@ -0,0 +1,275 @@
|
||||
# Build Instructions
|
||||
|
||||
This section contains the build instructions from the source code available at [our GitHub page](https://github.com/PhotonVision/photonvision).
|
||||
|
||||
## Development Setup
|
||||
|
||||
### Prerequisites
|
||||
|
||||
**Java Development Kit:**
|
||||
|
||||
This project requires Java Development Kit (JDK) 17 to be compiled. This is the same Java version that comes with WPILib for 2025+. **Windows Users must use the JDK that ships with WPILib.** For other platforms, you can follow the instructions to install JDK 17 for your platform [here](https://bell-sw.com/pages/downloads/#jdk-17-lts).
|
||||
|
||||
**Node JS:**
|
||||
|
||||
The UI is written in Node JS. To compile the UI, Node 18.20.4 to Node 20.0.0 is required. To install Node JS follow the instructions for your platform [on the official Node JS website](https://nodejs.org/en/download/). However, modify this line
|
||||
|
||||
```bash
|
||||
nvm install 20
|
||||
```
|
||||
|
||||
so that it instead reads
|
||||
|
||||
```javascript
|
||||
nvm install 18.20.4
|
||||
```
|
||||
|
||||
## Compiling Instructions
|
||||
|
||||
### Getting the Source Code
|
||||
|
||||
Get the source code from git:
|
||||
|
||||
```bash
|
||||
git clone https://github.com/PhotonVision/photonvision
|
||||
```
|
||||
|
||||
or alternatively download the source code from GitHub and extract the zip:
|
||||
|
||||
```{image} assets/git-download.png
|
||||
:alt: Download source code from git
|
||||
:width: 600
|
||||
```
|
||||
|
||||
### Install Necessary Node JS Dependencies
|
||||
|
||||
In the photon-client directory:
|
||||
|
||||
```bash
|
||||
npm install
|
||||
```
|
||||
|
||||
### Build and Copy UI to Java Source
|
||||
|
||||
In the root directory:
|
||||
|
||||
```{eval-rst}
|
||||
.. tab-set::
|
||||
|
||||
.. tab-item:: Linux
|
||||
|
||||
``./gradlew buildAndCopyUI``
|
||||
|
||||
.. tab-item:: macOS
|
||||
|
||||
``./gradlew buildAndCopyUI``
|
||||
|
||||
.. tab-item:: Windows (cmd)
|
||||
|
||||
``gradlew buildAndCopyUI``
|
||||
```
|
||||
|
||||
### Build and Run PhotonVision
|
||||
|
||||
To compile and run the project, issue the following command in the root directory:
|
||||
|
||||
```{eval-rst}
|
||||
.. tab-set::
|
||||
|
||||
.. tab-item:: Linux
|
||||
|
||||
``./gradlew run``
|
||||
|
||||
.. tab-item:: macOS
|
||||
|
||||
``./gradlew run``
|
||||
|
||||
.. tab-item:: Windows (cmd)
|
||||
|
||||
``gradlew run``
|
||||
```
|
||||
|
||||
Running the following command under the root directory will build the jar under `photon-server/build/libs`:
|
||||
|
||||
```{eval-rst}
|
||||
.. tab-set::
|
||||
|
||||
.. tab-item:: Linux
|
||||
|
||||
``./gradlew shadowJar``
|
||||
|
||||
.. tab-item:: macOS
|
||||
|
||||
``./gradlew shadowJar``
|
||||
|
||||
.. tab-item:: Windows (cmd)
|
||||
|
||||
``gradlew shadowJar``
|
||||
```
|
||||
|
||||
### Build and Run PhotonVision on a Raspberry Pi Coprocessor
|
||||
|
||||
As a convenience, the build has a built-in `deploy` command which builds, deploys, and starts the current source code on a coprocessor.
|
||||
|
||||
An architecture override is required to specify the deploy target's architecture.
|
||||
|
||||
```{eval-rst}
|
||||
.. tab-set::
|
||||
|
||||
.. tab-item:: Linux
|
||||
|
||||
``./gradlew clean``
|
||||
|
||||
``./gradlew deploy -PArchOverride=linuxarm64``
|
||||
|
||||
.. tab-item:: macOS
|
||||
|
||||
``./gradlew clean``
|
||||
|
||||
``./gradlew deploy -PArchOverride=linuxarm64``
|
||||
|
||||
.. tab-item:: Windows (cmd)
|
||||
|
||||
``gradlew clean``
|
||||
|
||||
``gradlew deploy -PArchOverride=linuxarm64``
|
||||
```
|
||||
|
||||
The `deploy` command is tested against Raspberry Pi coprocessors. Other similar coprocessors may work too.
|
||||
|
||||
### Using PhotonLib Builds
|
||||
|
||||
The build process automatically generates a vendordep JSON of your local build at `photon-lib/build/generated/vendordeps/photonlib.json`.
|
||||
|
||||
The photonlib source can be published to your local maven repository after building:
|
||||
|
||||
```{eval-rst}
|
||||
.. tab-set::
|
||||
|
||||
.. tab-item:: Linux
|
||||
|
||||
``./gradlew publishToMavenLocal``
|
||||
|
||||
.. tab-item:: macOS
|
||||
|
||||
``./gradlew publishToMavenLocal``
|
||||
|
||||
.. tab-item:: Windows (cmd)
|
||||
|
||||
``gradlew publishToMavenLocal``
|
||||
```
|
||||
|
||||
After adding the generated vendordep to your project, add the following to your project's `build.gradle` under the `plugins {}` block.
|
||||
|
||||
```Java
|
||||
repositories {
|
||||
mavenLocal()
|
||||
}
|
||||
```
|
||||
|
||||
### VSCode Test Runner Extension
|
||||
|
||||
With the VSCode [Extension Pack for Java](https://marketplace.visualstudio.com/items?itemName=vscjava.vscode-java-pack), you can get the Test Runner for Java and Gradle for Java extensions. This lets you easily run specific tests through the IDE:
|
||||
|
||||
```{image} assets/vscode-runner-tests.png
|
||||
:alt: An image showing how unit tests can be ran in VSCode through the Test Runner for Java extension.
|
||||
```
|
||||
|
||||
To correctly run PhotonVision tests this way, you must [delegate the tests to Gradle](https://code.visualstudio.com/docs/java/java-build#_delegate-tests-to-gradle). Debugging tests like this will [**not** currently](https://github.com/microsoft/build-server-for-gradle/issues/119) collect outputs.
|
||||
|
||||
### Debugging PhotonVision Running Locally
|
||||
|
||||
Unit tests can instead be debugged through the ``test`` Gradle task for a specific subproject in VSCode, found in the Gradle tab:
|
||||
|
||||
```{image} assets/vscode-gradle-tests.png
|
||||
:alt: An image showing how unit tests can be debugged in VSCode through the Gradle for Java extension.
|
||||
```
|
||||
|
||||
However, this will run all tests in a subproject.
|
||||
|
||||
Similarly, a local instance of PhotonVision can be debugged in the same way using the Gradle ``run`` task. In both cases, additional arguments can be specified:
|
||||
|
||||
```{image} assets/vscode-gradle-args.png
|
||||
:alt: An image showing how VSCode gradle tasks can specify additional arguments.
|
||||
```
|
||||
|
||||
### Debugging PhotonVision Running on a CoProcessor
|
||||
|
||||
Set up a VSCode configuration in {code}`launch.json`
|
||||
|
||||
```
|
||||
{
|
||||
// Use IntelliSense to learn about possible attributes.
|
||||
// Hover to view descriptions of existing attributes.
|
||||
// For more information, visit: https://go.microsoft.com/fwlink/?linkid=830387
|
||||
"version": "0.2.0",
|
||||
"configurations": [
|
||||
{
|
||||
"type": "java",
|
||||
"name": "Attach to CoProcessor",
|
||||
"request": "attach",
|
||||
"hostName": "photonvision.local",
|
||||
"port": "5801",
|
||||
"projectName": "photon-core"
|
||||
},
|
||||
]
|
||||
}
|
||||
```
|
||||
|
||||
Stop any existing instance of PhotonVision.
|
||||
|
||||
Launch the program with the following additional argument to the JVM: {code}`java -jar -agentlib:jdwp=transport=dt_socket,server=y,suspend=n,address=*:5801 photonvision.jar`
|
||||
|
||||
Once the program says it is listening on port 5801, launch the debug configuration in VSCode.
|
||||
|
||||
The program will wait for the VSCode debugger to attach before proceeding.
|
||||
|
||||
### Running examples
|
||||
|
||||
You can run one of the many built in examples straight from the command line, too! They contain a fully featured robot project, and some include simulation support. The projects can be found inside the photonlib-*-examples subdirectories for each language.
|
||||
|
||||
#### Running C++/Java
|
||||
|
||||
PhotonLib must first be published to your local maven repository. This will also copy the generated vendordep json file into each example. After that, the simulateJava/simulateNative task can be used like a normal robot project. Robot simulation with attached debugger is technically possible by using simulateExternalJava and modifying the launch script it exports, though not yet supported.
|
||||
|
||||
```
|
||||
~/photonvision$ ./gradlew publishToMavenLocal
|
||||
|
||||
~/photonvision$ cd photonlib-java-examples
|
||||
~/photonvision/photonlib-java-examples$ ./gradlew <example-name>:simulateJava
|
||||
|
||||
~/photonvision$ cd photonlib-cpp-examples
|
||||
~/photonvision/photonlib-cpp-examples$ ./gradlew <example-name>:simulateNative
|
||||
```
|
||||
|
||||
#### Running Python
|
||||
|
||||
PhotonLibPy must first be built into a wheel.
|
||||
|
||||
```
|
||||
> cd photon-lib/py
|
||||
> buildAndTest.bat
|
||||
```
|
||||
|
||||
Then, you must enable using the development wheels. robotpy will use pip behind the scenes, and this bat file tells pip about your development artifacts.
|
||||
|
||||
Note: This is best done in a virtual environment.
|
||||
|
||||
```
|
||||
> enableUsingDevBuilds.bat
|
||||
```
|
||||
|
||||
Then, run the examples:
|
||||
|
||||
```
|
||||
> cd photonlib-python-examples
|
||||
> run.bat <example name>
|
||||
```
|
||||
|
||||
#### Downloading Pipeline Artifacts
|
||||
|
||||
Using the [GitHub CLI](https://cli.github.com/), we can download artifacts from pipelines by run ID and name:
|
||||
|
||||
```
|
||||
~/photonvision$ gh run download 11759699679 -n jar-Linux
|
||||
```
|
||||
@@ -0,0 +1,112 @@
|
||||
# Camera Matching
|
||||
|
||||
Diagrams generated by the [PlantUML UML editor](https://www.plantuml.com/plantuml/). Copy the image URLs below and decode in the editor to make changes.
|
||||
|
||||
## Initial Setup
|
||||
|
||||
When PhotonVision first starts, settings are loaded from disk and [VisionSources](https://javadocs.photonvision.org/org/photonvision/vision/processes/VisionSource.html) are created for every serialized & active [Camera Configuration](https://javadocs.photonvision.org/org/photonvision/common/configuration/CameraConfiguration.html)
|
||||
|
||||
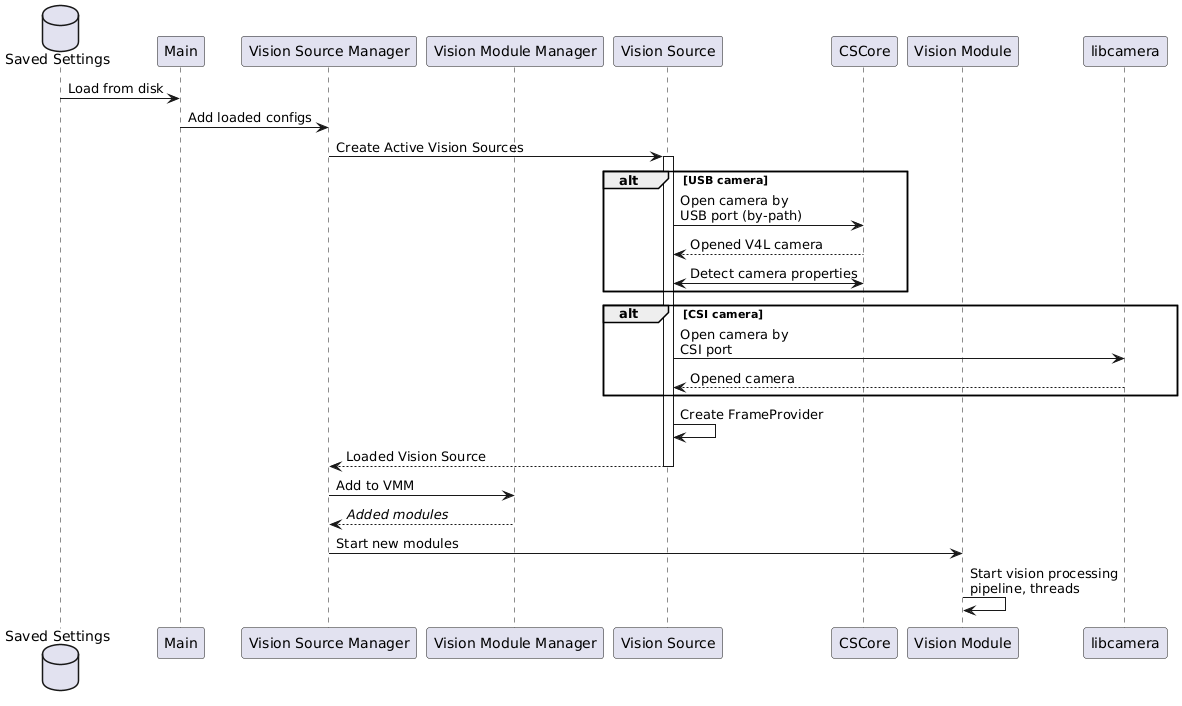
|
||||
|
||||
## UI Workflow
|
||||
|
||||
A [background thread](https://javadocs.photonvision.org/org/photonvision/common/util/TimedTaskManager.html) will periodically query CSCore and Libcamera for what cameras we currently see connected. This list is provided to the web UI for display.
|
||||
|
||||

|
||||
|
||||

|
||||
|
||||
This UI allows users to "Activate" a camera that's never been seen before, or activate a CameraConfiguration we've seen before but was disabled. Allowing camera configurations to be saved but not loaded by default lets us support temporarily disabling/unplugging a camera without flooding log files.
|
||||
|
||||
Since our backend logic intentionally does not protect users from plugging camera B into the port that camera A was active on, the UI shall show a warning but vision processing will (attempt to) continue like normal.
|
||||
|
||||
### Activate New Camera
|
||||
|
||||
When a new camera (ie, one we can't match by-path to a deserialized CameraConfiguration) is activated, we'll create a spin up a new Vision Module for it
|
||||
|
||||

|
||||
|
||||
### Deactivate Camera
|
||||
|
||||
Deactivating a camera will release the native resources it owns, and return the CameraConfiguration to the pool of currently disabled cameras we can re-enable later.
|
||||
|
||||

|
||||
|
||||
### Reactivate a CameraConfig
|
||||
|
||||
When a new camera (ie, one we can't match by-path to a deserialized CameraConfiguration) is activated, we'll create and spin up a new Vision Module for it.
|
||||
|
||||

|
||||
|
||||
# Camera Matching Requirements
|
||||
|
||||
## Definitions
|
||||
- VALID USB PATH: a path in the form `/dev/v4l/by-path/[UUID]`
|
||||
- VIDEO DEVICE PATH: a CSCore-provided identifier derived from the V4L path `/dev/video[N]` on Linux, or an opaque string on Windows
|
||||
- UNIQUE NAME: an identifier that is unique within the set of all deserialized CameraConfigurations and unmatched USB cameras
|
||||
- I don't love this, it means that a USB camera matched to a VisionModule will share a UNIQUE NAME, right?
|
||||
- DESERIALIZED CAMERA CONFIGURATIONS: The set of camera configurations loaded from disk and provided to the VisionSourceManager. This configuration data structure includes the UNIQUE NAME
|
||||
- CURRENTLY ACTIVE CAMERAS: The set of VisionModules currently active and processing vision data, and associated metadata
|
||||
|
||||
## Startup:
|
||||
|
||||
- GIVEN An emtpy set of deserialized Camera Configurations
|
||||
<br>WHEN PhotonVision starts
|
||||
<br>THEN no VisionModules will be started
|
||||
|
||||
- GIVEN A valid set of deserialized Camera Configurations
|
||||
<br>WHEN PhotonVision starts
|
||||
<br>THEN VisionModules will be started FOR EACH un-DISABLED config
|
||||
|
||||
- GIVEN A valid set of deserialized Camera Configurations
|
||||
<br>WHEN PhotonVision starts
|
||||
<br>THEN VisionModules will NOT be started FOR EACH DISABLED config
|
||||
|
||||
- GIVEN A CameraConfiguration with a VALID USB PATH
|
||||
<br>WHEN a VisionModule is created
|
||||
<br>THEN The VisionModule shall open the camera using the USB path
|
||||
|
||||
- GIVEN A CameraConfiguration without a valid USB path
|
||||
<br>WHEN a VisionModule is created
|
||||
<br>THEN The VisionModule shall open the camera using the VIDEO DEVICE PATH
|
||||
|
||||
## Camera (re)enumeration:
|
||||
|
||||
- GIVEN a NEW USB CAMERA is avaliable for enumeration
|
||||
<br>WHEN a USB camera is discovered by VisionSourceManager
|
||||
<br>AND the USB camera's VIDEO DEVICE PATH is not in the set of DESERIALIZED CAMERA CONFIGURATIONS
|
||||
<br>THEN a UNIQUE NAME will be assigned to the camera info
|
||||
|
||||
- GIVEN a NEW USB CAMERA is avaliable for enumeration
|
||||
<br>WHEN a USB camera is discovered by VisionSourceManager
|
||||
<br>AND the USB camera's VIDEO DEVICE PATH is in the set of DESERIALIZED CAMERA CONFIGURATIONS
|
||||
<br>THEN a UNIQUE NAME equal to the matching DESERIALIZED CAMERA CONFIGURATION will be assigned to the camera info
|
||||
- This is a weird case. How -should- we handle this? see above
|
||||
|
||||
## Creating from a new camera
|
||||
|
||||
- Given: A UNIQUE NAME from a NEW USB CAMERA
|
||||
<br>WHEN I request a new VisionModule is created for this NEW USB CAMREA
|
||||
<br>AND the camera has a VALID USB PATH
|
||||
<br>AND the camera's VALID USB PATH is not in use by any CURRENTLY ACTIVE CAMERAS
|
||||
<br>THEN a NEW VisionModule will be started for the NEW USB CAMERA using the VALID USB PATH
|
||||
|
||||
- Given: A UNIQUE NAME from a NEW USB CAMERA
|
||||
<br>WHEN I request a new VisionModule is created for this NEW USB CAMREA
|
||||
<br>AND the camera does not have a VALID USB PATH
|
||||
<br>AND the camera's VIDEO DEVICE PATH is not in use by any CURRENTLY ACTIVE CAMERAS
|
||||
<br>THEN a NEW VisionModule will be started for the NEW USB CAMERA using the VIDEO DEVICE PATH
|
||||
|
||||
## Deactivate
|
||||
|
||||
- Given: A UNIQUE NAME from a CURRENTLY ACTIVE CAMERA
|
||||
<br>WHEN I request the VisionModule be DEACTIVATED
|
||||
<br>THEN the VisionModule will be stopped for the given CURRENTLY ACTIVE CAMERA
|
||||
<br>AND the CameraConfiguration DISABLED flag will be set to TRUE
|
||||
|
||||
## Reactivate
|
||||
|
||||
- Given: A UNIQUE NAME from a DESERIALIZED CAMERA CONFIGURATIONS
|
||||
<br>WHEN I request the VisionModule be ACTIVATED
|
||||
<br>AND the CameraConfiguration's DISABLED flag is TRUE
|
||||
<br>THEN a VisionModule will be created and started for the camera
|
||||