Compare commits
280 Commits
v2025.2.1-
...
py-docs
| Author | SHA1 | Date | |
|---|---|---|---|
|
|
f022130bfa | ||
|
|
5457db947e | ||
|
|
8c7ca1697e | ||
|
|
a7329c48a3 | ||
|
|
ce0b00ee03 | ||
|
|
a8d825919e | ||
|
|
63593b873a | ||
|
|
aa64bfe82e | ||
|
|
d27b3d0775 | ||
|
|
77e5545eef | ||
|
|
618072c3dd | ||
|
|
7d2c69dbdb | ||
|
|
a2b19c080e | ||
|
|
def3b9faa8 | ||
|
|
25c355ebc2 | ||
|
|
dad7f0a82d | ||
|
|
6f2603f0cb | ||
|
|
f499e4fb50 | ||
|
|
e5c8859c57 | ||
|
|
2cde701cff | ||
|
|
d649a9cb9e | ||
|
|
695742bfcf | ||
|
|
5df9137256 | ||
|
|
36b437323f | ||
|
|
5d39ef5b62 | ||
|
|
2bb59f8437 | ||
|
|
cd502a22c7 | ||
|
|
f16ffe3cd2 | ||
|
|
45236b872a | ||
|
|
6b20dc3c1b | ||
|
|
9f6d8caf48 | ||
|
|
3cbac8117e | ||
|
|
8e88a9a780 | ||
|
|
99ca8228a1 | ||
|
|
7cb3b7a37b | ||
|
|
054ed8b6a1 | ||
|
|
d44480ddad | ||
|
|
c71921c41e | ||
|
|
ee4501f1d6 | ||
|
|
d9b86a718e | ||
|
|
1ac185c247 | ||
|
|
7170c29efe | ||
|
|
4f549ba579 | ||
|
|
b531fe6b81 | ||
|
|
373ed2ff05 | ||
|
|
115bc09f2e | ||
|
|
7497566f56 | ||
|
|
85f155c77b | ||
|
|
797936865f | ||
|
|
831df409f7 | ||
|
|
b89ab49d34 | ||
|
|
099c88e0b7 | ||
|
|
1ee2ecb608 | ||
|
|
82d6b6b845 | ||
|
|
8ec041493a | ||
|
|
da608a5070 | ||
|
|
17c23b0390 | ||
|
|
e486ff5a50 | ||
|
|
e84e3e7c7c | ||
|
|
a1d06a9920 | ||
|
|
04e9bffeb7 | ||
|
|
4b01b66ab7 | ||
|
|
ee56bf7597 | ||
|
|
058ca19262 | ||
|
|
b43d0dde20 | ||
|
|
3300b90823 | ||
|
|
f58416fe16 | ||
|
|
62eb66a493 | ||
|
|
fcbc392d83 | ||
|
|
7d927aca3b | ||
|
|
bd2c5062f9 | ||
|
|
354f4e945e | ||
|
|
2eb224a55f | ||
|
|
2ab7a2e389 | ||
|
|
27a1cfcb12 | ||
|
|
c7f5edc262 | ||
|
|
6fe96316a4 | ||
|
|
b32d9c6ee3 | ||
|
|
7766d99ca6 | ||
|
|
81a5a48ac4 | ||
|
|
29e183660f | ||
|
|
8676649ebc | ||
|
|
35dcc3ce5a | ||
|
|
9277960018 | ||
|
|
e23df8c9a4 | ||
|
|
22490b8c38 | ||
|
|
3ac509b40d | ||
|
|
0ea108e17f | ||
|
|
da715244cb | ||
|
|
ab854e91e5 | ||
|
|
a930852bee | ||
|
|
65c214ac2d | ||
|
|
bf8073ab26 | ||
|
|
2bf166bc3f | ||
|
|
2c98d10a92 | ||
|
|
923f9564dc | ||
|
|
ad64bfeaa9 | ||
|
|
ffd4d1f80e | ||
|
|
1310640e10 | ||
|
|
753123844b | ||
|
|
ba1c0db7e1 | ||
|
|
fce54d12c1 | ||
|
|
3e19cd45cc | ||
|
|
6b49e92d00 | ||
|
|
29e24bbac2 | ||
|
|
cefaa313df | ||
|
|
4b5bc6ae84 | ||
|
|
758fbb9110 | ||
|
|
02e6b6d3e2 | ||
|
|
af689b61d5 | ||
|
|
8215cafbae | ||
|
|
ed58f69275 | ||
|
|
a62d5e0eee | ||
|
|
2e97c95be1 | ||
|
|
6610b21b6e | ||
|
|
ef5e6463cb | ||
|
|
7f6edcd567 | ||
|
|
d7e536dda9 | ||
|
|
dbbb00f955 | ||
|
|
78f57600cc | ||
|
|
d341ebbadf | ||
|
|
d88ea4a75d | ||
|
|
46ac1baa69 | ||
|
|
f802e8c10c | ||
|
|
647c238987 | ||
|
|
4a648b302a | ||
|
|
cc7923eeb4 | ||
|
|
a9c26202a0 | ||
|
|
783d9d73be | ||
|
|
efc997dfbd | ||
|
|
3df58485c2 | ||
|
|
25851525ce | ||
|
|
46e71703ef | ||
|
|
4b740a5485 | ||
|
|
413cf8c4af | ||
|
|
d2193037f9 | ||
|
|
6fbb41fb76 | ||
|
|
05fcf876cd | ||
|
|
1637be6044 | ||
|
|
6f2fd19351 | ||
|
|
892e240b18 | ||
|
|
326c77fa38 | ||
|
|
8cf48bee57 | ||
|
|
26f08a6fdf | ||
|
|
abb8ccf4e9 | ||
|
|
50adef1672 | ||
|
|
cf68403182 | ||
|
|
dc0985dfb5 | ||
|
|
8fb29ff5c4 | ||
|
|
476cd6df8b | ||
|
|
783ed82d50 | ||
|
|
416e2f7607 | ||
|
|
ebd1071553 | ||
|
|
fa8b60fe27 | ||
|
|
52125067ac | ||
|
|
db591f720c | ||
|
|
c81d4addb9 | ||
|
|
c2581f3e99 | ||
|
|
96b0938dc0 | ||
|
|
697e52f886 | ||
|
|
87b219d9be | ||
|
|
abcd6b8f50 | ||
|
|
aa0760e97a | ||
|
|
74322affde | ||
|
|
bec8092660 | ||
|
|
29f76bc1c3 | ||
|
|
35c79b138c | ||
|
|
73cd2ab62c | ||
|
|
ae9f73130f | ||
|
|
c1b0c8a831 | ||
|
|
99b4dc8725 | ||
|
|
0c9502d8b9 | ||
|
|
c15c62698a | ||
|
|
7bbfe6f05b | ||
|
|
5349cae965 | ||
|
|
3ea9100845 | ||
|
|
ad1f51ba06 | ||
|
|
1b1f8029c8 | ||
|
|
1bb861545b | ||
|
|
a4295275ed | ||
|
|
0dfca8c04f | ||
|
|
3ed8d3a4f3 | ||
|
|
7f7d80bc3b | ||
|
|
89c0cc3a01 | ||
|
|
e514071094 | ||
|
|
38ee450117 | ||
|
|
23d5e5b34f | ||
|
|
75dee20d77 | ||
|
|
ed7fc6bbcc | ||
|
|
8a2c9f2ae0 | ||
|
|
c45c2a0a1f | ||
|
|
b86217a59a | ||
|
|
4ffd1fc600 | ||
|
|
a42aed1e7f | ||
|
|
20e2fe46ba | ||
|
|
1fb02a477d | ||
|
|
09f8d1c2a5 | ||
|
|
e754f5944e | ||
|
|
089233f4be | ||
|
|
b1f8598a03 | ||
|
|
b8d74522bd | ||
|
|
5ff025fdbf | ||
|
|
537cd7c564 | ||
|
|
1c42755451 | ||
|
|
b22371d7c0 | ||
|
|
63b1ff242c | ||
|
|
be490a7dea | ||
|
|
44893b14b0 | ||
|
|
d22abdfd76 | ||
|
|
3eea79f0d4 | ||
|
|
0147a44100 | ||
|
|
0bec1f239c | ||
|
|
44b46cf117 | ||
|
|
ffdda9ddfa | ||
|
|
a5bc63878d | ||
|
|
a5b1cc0ded | ||
|
|
cbdea5d0f1 | ||
|
|
9a88e565fb | ||
|
|
aacbdf5010 | ||
|
|
3547d0584b | ||
|
|
40815020de | ||
|
|
e522642a48 | ||
|
|
3cdda8a84e | ||
|
|
228caf47f2 | ||
|
|
d1761d07e9 | ||
|
|
331f4f0218 | ||
|
|
eb85834180 | ||
|
|
871ca61c8d | ||
|
|
925defc868 | ||
|
|
358f5747ab | ||
|
|
e334d26459 | ||
|
|
77d5388a35 | ||
|
|
88a1e789ad | ||
|
|
abc67bdd95 | ||
|
|
05309b1e25 | ||
|
|
ddacff7079 | ||
|
|
32e4f0029b | ||
|
|
34057f223d | ||
|
|
55303ccd9c | ||
|
|
3c73b68ba3 | ||
|
|
6d816b5053 | ||
|
|
7c6bab1dfa | ||
|
|
462a2aa629 | ||
|
|
47b799a0ce | ||
|
|
35c72e8446 | ||
|
|
c440ce57ce | ||
|
|
8452527589 | ||
|
|
843c1fed17 | ||
|
|
781126719a | ||
|
|
a93be9c816 | ||
|
|
1af3dab37a | ||
|
|
163dbe58e4 | ||
|
|
c26a7cc5ac | ||
|
|
6170958be9 | ||
|
|
ea9bd4ac93 | ||
|
|
aa15eedc7a | ||
|
|
1798b67dd3 | ||
|
|
f92cf62a54 | ||
|
|
3c332db4bf | ||
|
|
4e1d7bbb3d | ||
|
|
97dbcdd252 | ||
|
|
0ef7c803f9 | ||
|
|
410a4c75b7 | ||
|
|
edf42f5102 | ||
|
|
3e879cc30f | ||
|
|
c2127ac820 | ||
|
|
002373e395 | ||
|
|
de98f5f02d | ||
|
|
30645803e6 | ||
|
|
abbf3f2820 | ||
|
|
8d4024b8c8 | ||
|
|
f6736fc730 | ||
|
|
889c73ec91 | ||
|
|
8fe53f3b84 | ||
|
|
a3304818d2 | ||
|
|
4057205583 | ||
|
|
7f1936d609 | ||
|
|
f41a472308 | ||
|
|
9589967808 | ||
|
|
311846dc26 |
@@ -68,19 +68,26 @@ ForEachMacros:
|
||||
- BOOST_FOREACH
|
||||
IncludeBlocks: Regroup
|
||||
IncludeCategories:
|
||||
- Regex: '^<ext/.*\.h>'
|
||||
Priority: 2
|
||||
SortPriority: 0
|
||||
- Regex: '^<.*\.h>'
|
||||
Priority: 1
|
||||
SortPriority: 0
|
||||
- Regex: '^<.*'
|
||||
Priority: 2
|
||||
SortPriority: 0
|
||||
- Regex: '.*'
|
||||
Priority: 3
|
||||
SortPriority: 0
|
||||
IncludeIsMainRegex: '([-_](test|unittest))?$'
|
||||
# C standard library headers
|
||||
#
|
||||
# https://en.cppreference.com/w/cpp/header:
|
||||
# * C compatibility headers
|
||||
# * Special C compatibility headers
|
||||
# * Empty C headers
|
||||
# * Meaningless C headers
|
||||
# * Unsupported C headers
|
||||
- Regex: '^<(assert\.h|ctype\.h|errno\.h|fenv\.h|float\.h|inttypes\.h|limits\.h|locale\.h|math\.h|setjmp\.h|signal\.h|stdarg\.h|stddef\.h|stdint\.h|stdio\.h|stdlib\.h|string\.h|time\.h|uchar\.h|wchar\.h|wctype\.h|stdatomic\.h|ccomplex|complex\.h|ctgmath|tgmath\.h|ciso646|cstdalign|cstdbool|iso646\.h|stdalign\.h|stdbool\.h|stdatomic\.h|stdnoreturn\.h|threads\.h)>'
|
||||
Priority: 1
|
||||
# C++ standard library headers (lowercase and underscores with no .h suffix)
|
||||
- Regex: '^<[a-z_]+>'
|
||||
Priority: 2
|
||||
# Other library headers (angle brackets)
|
||||
- Regex: '^<.*'
|
||||
Priority: 3
|
||||
# Project headers (double quotes)
|
||||
- Regex: '^".*'
|
||||
Priority: 4
|
||||
IncludeIsMainRegex: '(Test|_test)?$'
|
||||
IncludeIsMainSourceRegex: ''
|
||||
IndentCaseLabels: true
|
||||
IndentGotoLabels: true
|
||||
@@ -136,7 +143,7 @@ RawStringFormats:
|
||||
CanonicalDelimiter: ''
|
||||
BasedOnStyle: google
|
||||
ReflowComments: true
|
||||
SortIncludes: false
|
||||
SortIncludes: true
|
||||
SortUsingDeclarations: true
|
||||
SpaceAfterCStyleCast: false
|
||||
SpaceAfterLogicalNot: false
|
||||
|
||||
1
.github/ISSUE_TEMPLATE/bug_report.md
vendored
@@ -22,6 +22,7 @@ If applicable, add screenshots to help explain your problem. Additionally, provi
|
||||
|
||||
**Platform:**
|
||||
- Hardware Platform (ex. Raspberry Pi 4, Windows x64):
|
||||
- How is it powered? (ex. Zinc-V, Pololu Buck Converter, Battery Bank):
|
||||
- Network Configuration (Connection between the Radio and any devices in between, such as a Network Switch):
|
||||
- PhotonVision Version:
|
||||
- Browser (with Version) (Chrome, Edge, Firefox, etc.):
|
||||
|
||||
17
.github/ISSUE_TEMPLATE/docs_issue.md
vendored
Normal file
@@ -0,0 +1,17 @@
|
||||
---
|
||||
name: Documentation Request
|
||||
about: Something needs to be documented/updated in the documentation
|
||||
title: ''
|
||||
labels: documentation
|
||||
assignees: ''
|
||||
|
||||
---
|
||||
|
||||
**Are you requesting documentation for a new feature, or updated documentation for an old feature?**
|
||||
Put the feature you are requesting documentation for here, along with whether the documentation is stale and needs to be updated, or whether the documentation does not exist, and needs to be created.
|
||||
|
||||
**Where is it?**
|
||||
Put the location of the documentation that needs to be updated here. If you're requesting documenation for a new feature, put where you think it should go.
|
||||
|
||||
**Additional context**
|
||||
Add any other context or screenshots about the feature request here.
|
||||
15
.github/labeler.yml
vendored
Normal file
@@ -0,0 +1,15 @@
|
||||
"backend":
|
||||
- changed-files:
|
||||
- any-glob-to-any-file: [photon-core/**, photon-server/**]
|
||||
"documentation":
|
||||
- changed-files:
|
||||
- any-glob-to-any-file: [docs/**, photon-docs/**]
|
||||
"frontend":
|
||||
- changed-files:
|
||||
- any-glob-to-any-file: photon-client/**
|
||||
"photonlib":
|
||||
- changed-files:
|
||||
- any-glob-to-any-file: photon-lib*/**
|
||||
"website":
|
||||
- changed-files:
|
||||
- any-glob-to-any-file: website/**
|
||||
4
.github/pull_request_template.md
vendored
@@ -11,7 +11,9 @@
|
||||
Merge checklist:
|
||||
- [ ] Pull Request title is [short, imperative summary](https://cbea.ms/git-commit/) of proposed changes
|
||||
- [ ] The description documents the _what_ and _why_
|
||||
- [ ] This PR has been [linted](https://docs.photonvision.org/en/latest/docs/contributing/linting.html).
|
||||
- [ ] If this PR changes behavior or adds a feature, user documentation is updated
|
||||
- [ ] If this PR touches photon-serde, all messages have been regenerated and hashes have not changed unexpectedly
|
||||
- [ ] If this PR touches configuration, this is backwards compatible with settings back to v2024.3.1
|
||||
- [ ] If this PR touches configuration, this is backwards compatible with settings back to v2025.3.2
|
||||
- [ ] If this PR touches pipeline settings or anything related to data exchange, the frontend typing is updated
|
||||
- [ ] If this PR addresses a bug, a regression test for it is added
|
||||
|
||||
226
.github/workflows/build.yml
vendored
@@ -3,38 +3,23 @@ name: Build
|
||||
on:
|
||||
# Run on pushes to main and pushed tags, and on pull requests against main, but ignore the docs folder
|
||||
push:
|
||||
branches: [ main ]
|
||||
tags:
|
||||
- 'v*'
|
||||
pull_request:
|
||||
branches: [ main ]
|
||||
merge_group:
|
||||
|
||||
concurrency:
|
||||
group: ${{ github.workflow }}-${{ github.head_ref || github.ref }}
|
||||
cancel-in-progress: true
|
||||
|
||||
env:
|
||||
IMAGE_VERSION: v2026.0.4
|
||||
|
||||
jobs:
|
||||
build-client:
|
||||
name: "PhotonClient Build"
|
||||
defaults:
|
||||
run:
|
||||
working-directory: photon-client
|
||||
runs-on: ubuntu-22.04
|
||||
|
||||
validation:
|
||||
name: "Validation"
|
||||
runs-on: ubuntu-latest
|
||||
steps:
|
||||
- uses: actions/checkout@v4
|
||||
- name: Setup Node.js
|
||||
uses: actions/setup-node@v4
|
||||
with:
|
||||
node-version: 18
|
||||
- name: Install Dependencies
|
||||
run: npm ci
|
||||
- name: Build Production Client
|
||||
run: npm run build
|
||||
- uses: actions/upload-artifact@v4
|
||||
with:
|
||||
name: built-client
|
||||
path: photon-client/dist/
|
||||
- uses: gradle/actions/wrapper-validation@v4
|
||||
build-examples:
|
||||
|
||||
strategy:
|
||||
@@ -49,6 +34,7 @@ jobs:
|
||||
|
||||
name: "Photonlib - Build Examples - ${{ matrix.os }}"
|
||||
runs-on: ${{ matrix.os }}
|
||||
needs: [validation]
|
||||
|
||||
steps:
|
||||
- name: Checkout code
|
||||
@@ -76,6 +62,7 @@ jobs:
|
||||
build-gradle:
|
||||
name: "Gradle Build"
|
||||
runs-on: ubuntu-22.04
|
||||
needs: [validation]
|
||||
steps:
|
||||
# Checkout code.
|
||||
- name: Checkout code
|
||||
@@ -89,22 +76,20 @@ jobs:
|
||||
with:
|
||||
java-version: 17
|
||||
distribution: temurin
|
||||
- name: Install pnpm
|
||||
uses: pnpm/action-setup@v4
|
||||
with:
|
||||
version: 10
|
||||
- name: Setup Node.js
|
||||
uses: actions/setup-node@v4
|
||||
with:
|
||||
node-version: 22
|
||||
- name: Install mrcal deps
|
||||
run: sudo apt-get update && sudo apt-get install -y libcholmod3 liblapack3 libsuitesparseconfig5
|
||||
- name: Gradle Build
|
||||
run: ./gradlew photon-targeting:build photon-core:build photon-server:build -x check
|
||||
- name: Gradle Tests
|
||||
run: ./gradlew testHeadless -i --stacktrace
|
||||
- name: Gradle Coverage
|
||||
run: ./gradlew jacocoTestReport
|
||||
- name: Publish Coverage Report
|
||||
uses: codecov/codecov-action@v4
|
||||
with:
|
||||
file: ./photon-server/build/reports/jacoco/test/jacocoTestReport.xml
|
||||
- name: Publish Core Coverage Report
|
||||
uses: codecov/codecov-action@v4
|
||||
with:
|
||||
file: ./photon-core/build/reports/jacoco/test/jacocoTestReport.xml
|
||||
- name: Gradle Tests and Coverage
|
||||
run: ./gradlew test jacocoTestReport --stacktrace
|
||||
build-offline-docs:
|
||||
name: "Build Offline Docs"
|
||||
runs-on: ubuntu-22.04
|
||||
@@ -135,6 +120,7 @@ jobs:
|
||||
build-photonlib-vendorjson:
|
||||
name: "Build Vendor JSON"
|
||||
runs-on: ubuntu-22.04
|
||||
needs: [validation]
|
||||
steps:
|
||||
- uses: actions/checkout@v4
|
||||
with:
|
||||
@@ -179,6 +165,7 @@ jobs:
|
||||
|
||||
name: "Photonlib - Build Host - ${{ matrix.artifact-name }}"
|
||||
runs-on: ${{ matrix.os }}
|
||||
needs: [validation]
|
||||
steps:
|
||||
- uses: actions/checkout@v4
|
||||
with:
|
||||
@@ -190,7 +177,7 @@ jobs:
|
||||
distribution: temurin
|
||||
architecture: ${{ matrix.architecture }}
|
||||
- run: git fetch --tags --force
|
||||
- run: ./gradlew photon-targeting:build photon-lib:build -i
|
||||
- run: ./gradlew photon-targeting:build photon-lib:build
|
||||
name: Build with Gradle
|
||||
- run: ./gradlew photon-lib:publish photon-targeting:publish
|
||||
name: Publish
|
||||
@@ -222,6 +209,7 @@ jobs:
|
||||
runs-on: ubuntu-22.04
|
||||
container: ${{ matrix.container }}
|
||||
name: "Photonlib - Build Docker - ${{ matrix.artifact-name }}"
|
||||
needs: [validation]
|
||||
steps:
|
||||
- uses: actions/checkout@v4
|
||||
with:
|
||||
@@ -231,7 +219,7 @@ jobs:
|
||||
git config --global --add safe.directory /__w/photonvision/photonvision
|
||||
- name: Build PhotonLib
|
||||
# We don't need to run tests, since we specify only non-native platforms
|
||||
run: ./gradlew photon-targeting:build photon-lib:build ${{ matrix.build-options }} -i -x test
|
||||
run: ./gradlew photon-targeting:build photon-lib:build ${{ matrix.build-options }} -x test
|
||||
- name: Publish
|
||||
run: ./gradlew photon-lib:publish photon-targeting:publish ${{ matrix.build-options }}
|
||||
env:
|
||||
@@ -270,7 +258,7 @@ jobs:
|
||||
path: output/*.zip
|
||||
|
||||
build-package:
|
||||
needs: [build-client, build-gradle, build-offline-docs]
|
||||
needs: [build-gradle, build-offline-docs]
|
||||
|
||||
strategy:
|
||||
fail-fast: false
|
||||
@@ -310,21 +298,19 @@ jobs:
|
||||
java-version: 17
|
||||
distribution: temurin
|
||||
architecture: ${{ matrix.architecture }}
|
||||
- name: Install pnpm
|
||||
uses: pnpm/action-setup@v4
|
||||
with:
|
||||
version: 10
|
||||
- name: Setup Node.js
|
||||
uses: actions/setup-node@v4
|
||||
with:
|
||||
node-version: 22
|
||||
cache: pnpm
|
||||
cache-dependency-path: photon-client/pnpm-lock.yaml
|
||||
- name: Install Arm64 Toolchain
|
||||
run: ./gradlew installArm64Toolchain
|
||||
if: ${{ (matrix.artifact-name) == 'LinuxArm64' }}
|
||||
- run: |
|
||||
rm -rf photon-server/src/main/resources/web/*
|
||||
mkdir -p photon-server/src/main/resources/web/docs
|
||||
if: ${{ (matrix.os) != 'windows-latest' }}
|
||||
- run: |
|
||||
del photon-server\src\main\resources\web\*.*
|
||||
mkdir photon-server\src\main\resources\web\docs
|
||||
if: ${{ (matrix.os) == 'windows-latest' }}
|
||||
- uses: actions/download-artifact@v4
|
||||
with:
|
||||
name: built-client
|
||||
path: photon-server/src/main/resources/web/
|
||||
- uses: actions/download-artifact@v4
|
||||
with:
|
||||
name: built-docs
|
||||
@@ -374,7 +360,7 @@ jobs:
|
||||
- run: |
|
||||
sudo apt-get update
|
||||
sudo apt-get install --yes libcholmod3 liblapack3 libsuitesparseconfig5
|
||||
if: ${{ (matrix.os) == 'ubuntu-22.04' }}
|
||||
if: ${{ (matrix.os) == 'ubuntu-24.04' }}
|
||||
# and actually run the jar
|
||||
- run: java -jar ${{ matrix.extraOpts }} *.jar --smoketest
|
||||
if: ${{ (matrix.os) != 'windows-latest' }}
|
||||
@@ -388,10 +374,10 @@ jobs:
|
||||
fail-fast: false
|
||||
matrix:
|
||||
include:
|
||||
- os: ubuntu-22.04
|
||||
- os: ubuntu-24.04
|
||||
artifact-name: LinuxArm64
|
||||
image_suffix: RaspberryPi
|
||||
image_url: https://github.com/PhotonVision/photon-image-modifier/releases/download/v2025.0.3/photonvision_raspi.img.xz
|
||||
image_url: https://github.com/PhotonVision/photon-image-modifier/releases/download/$IMAGE_VERSION/photonvision_raspi.img.xz
|
||||
cpu: cortex-a7
|
||||
image_additional_mb: 0
|
||||
extraOpts: -Djdk.lang.Process.launchMechanism=vfork
|
||||
@@ -427,69 +413,81 @@ jobs:
|
||||
fail-fast: false
|
||||
matrix:
|
||||
include:
|
||||
- os: ubuntu-22.04
|
||||
- os: ubuntu-24.04
|
||||
artifact-name: LinuxArm64
|
||||
image_suffix: RaspberryPi
|
||||
image_url: https://github.com/PhotonVision/photon-image-modifier/releases/download/v2025.0.3/photonvision_raspi.img.xz
|
||||
image_url: https://github.com/PhotonVision/photon-image-modifier/releases/download/$IMAGE_VERSION/photonvision_raspi.img.xz
|
||||
cpu: cortex-a7
|
||||
image_additional_mb: 0
|
||||
- os: ubuntu-22.04
|
||||
- os: ubuntu-24.04
|
||||
artifact-name: LinuxArm64
|
||||
image_suffix: limelight2
|
||||
image_url: https://github.com/PhotonVision/photon-image-modifier/releases/download/v2025.0.3/photonvision_limelight.img.xz
|
||||
image_url: https://github.com/PhotonVision/photon-image-modifier/releases/download/$IMAGE_VERSION/photonvision_limelight.img.xz
|
||||
cpu: cortex-a7
|
||||
image_additional_mb: 0
|
||||
- os: ubuntu-22.04
|
||||
- os: ubuntu-24.04
|
||||
artifact-name: LinuxArm64
|
||||
image_suffix: limelight3
|
||||
image_url: https://github.com/PhotonVision/photon-image-modifier/releases/download/v2025.0.3/photonvision_limelight3.img.xz
|
||||
image_url: https://github.com/PhotonVision/photon-image-modifier/releases/download/$IMAGE_VERSION/photonvision_limelight3.img.xz
|
||||
cpu: cortex-a7
|
||||
image_additional_mb: 0
|
||||
- os: ubuntu-22.04
|
||||
- os: ubuntu-24.04
|
||||
artifact-name: LinuxArm64
|
||||
image_suffix: limelight3G
|
||||
image_url: https://github.com/PhotonVision/photon-image-modifier/releases/download/v2025.0.3/photonvision_limelight3g.img.xz
|
||||
image_url: https://github.com/PhotonVision/photon-image-modifier/releases/download/$IMAGE_VERSION/photonvision_limelight3g.img.xz
|
||||
cpu: cortex-a7
|
||||
image_additional_mb: 0
|
||||
- os: ubuntu-22.04
|
||||
- os: ubuntu-24.04
|
||||
artifact-name: LinuxArm64
|
||||
image_suffix: limelight4
|
||||
image_url: https://github.com/PhotonVision/photon-image-modifier/releases/download/$IMAGE_VERSION/photonvision_limelight4.img.xz
|
||||
cpu: cortex-a76
|
||||
image_additional_mb: 0
|
||||
- os: ubuntu-24.04
|
||||
artifact-name: LinuxArm64
|
||||
image_suffix: luma_p1
|
||||
image_url: https://github.com/PhotonVision/photon-image-modifier/releases/download/$IMAGE_VERSION/photonvision_luma_p1.img.xz
|
||||
cpu: cortex-a76
|
||||
image_additional_mb: 0
|
||||
- os: ubuntu-24.04
|
||||
artifact-name: LinuxArm64
|
||||
image_suffix: orangepi5
|
||||
image_url: https://github.com/PhotonVision/photon-image-modifier/releases/download/v2025.0.3/photonvision_opi5.img.xz
|
||||
image_url: https://github.com/PhotonVision/photon-image-modifier/releases/download/$IMAGE_VERSION/photonvision_opi5.img.xz
|
||||
cpu: cortex-a8
|
||||
image_additional_mb: 1024
|
||||
- os: ubuntu-22.04
|
||||
- os: ubuntu-24.04
|
||||
artifact-name: LinuxArm64
|
||||
image_suffix: orangepi5b
|
||||
image_url: https://github.com/PhotonVision/photon-image-modifier/releases/download/v2025.0.3/photonvision_opi5b.img.xz
|
||||
image_url: https://github.com/PhotonVision/photon-image-modifier/releases/download/$IMAGE_VERSION/photonvision_opi5b.img.xz
|
||||
cpu: cortex-a8
|
||||
image_additional_mb: 1024
|
||||
- os: ubuntu-22.04
|
||||
- os: ubuntu-24.04
|
||||
artifact-name: LinuxArm64
|
||||
image_suffix: orangepi5plus
|
||||
image_url: https://github.com/PhotonVision/photon-image-modifier/releases/download/v2025.0.3/photonvision_opi5plus.img.xz
|
||||
image_url: https://github.com/PhotonVision/photon-image-modifier/releases/download/$IMAGE_VERSION/photonvision_opi5plus.img.xz
|
||||
cpu: cortex-a8
|
||||
image_additional_mb: 1024
|
||||
- os: ubuntu-22.04
|
||||
- os: ubuntu-24.04
|
||||
artifact-name: LinuxArm64
|
||||
image_suffix: orangepi5pro
|
||||
image_url: https://github.com/PhotonVision/photon-image-modifier/releases/download/v2025.0.3/photonvision_opi5pro.img.xz
|
||||
image_url: https://github.com/PhotonVision/photon-image-modifier/releases/download/$IMAGE_VERSION/photonvision_opi5pro.img.xz
|
||||
cpu: cortex-a8
|
||||
image_additional_mb: 1024
|
||||
- os: ubuntu-22.04
|
||||
- os: ubuntu-24.04
|
||||
artifact-name: LinuxArm64
|
||||
image_suffix: orangepi5max
|
||||
image_url: https://github.com/PhotonVision/photon-image-modifier/releases/download/v2025.0.3/photonvision_opi5max.img.xz
|
||||
image_url: https://github.com/PhotonVision/photon-image-modifier/releases/download/$IMAGE_VERSION/photonvision_opi5max.img.xz
|
||||
cpu: cortex-a8
|
||||
image_additional_mb: 1024
|
||||
- os: ubuntu-22.04
|
||||
- os: ubuntu-24.04
|
||||
artifact-name: LinuxArm64
|
||||
image_suffix: rock5c
|
||||
image_url: https://github.com/PhotonVision/photon-image-modifier/releases/download/v2025.0.3/photonvision_rock5c.img.xz
|
||||
image_url: https://github.com/PhotonVision/photon-image-modifier/releases/download/$IMAGE_VERSION/photonvision_rock5c.img.xz
|
||||
cpu: cortex-a8
|
||||
image_additional_mb: 1024
|
||||
|
||||
runs-on: ${{ matrix.os }}
|
||||
name: "Build image - ${{ matrix.image_url }}"
|
||||
name: "Build image - ${{ matrix.image_suffix }}"
|
||||
|
||||
steps:
|
||||
- name: Checkout code
|
||||
@@ -523,8 +521,40 @@ jobs:
|
||||
with:
|
||||
name: image-${{ matrix.image_suffix }}
|
||||
path: photonvision*.xz
|
||||
build-rubik-image:
|
||||
needs: [build-package]
|
||||
|
||||
if: ${{ github.event_name != 'pull_request' }}
|
||||
|
||||
runs-on: ubuntu-24.04
|
||||
name: "Build image - Rubik Pi 3"
|
||||
|
||||
steps:
|
||||
- name: Checkout code
|
||||
uses: actions/checkout@v4
|
||||
with:
|
||||
fetch-depth: 0
|
||||
- uses: actions/download-artifact@v4
|
||||
with:
|
||||
name: jar-LinuxArm64
|
||||
- name: Generate image
|
||||
run: |
|
||||
wget https://raw.githubusercontent.com/PhotonVision/photon-image-modifier/refs/tags/$IMAGE_VERSION/mount_rubikpi3.sh
|
||||
chmod +x mount_rubikpi3.sh
|
||||
./mount_rubikpi3.sh https://github.com/PhotonVision/photon-image-modifier/releases/download/$IMAGE_VERSION/photonvision_rubikpi3.tar.xz /tmp/build/scripts/armrunner.sh
|
||||
- name: Compress image
|
||||
run: |
|
||||
new_jar=$(realpath $(find . -name photonvision\*-linuxarm64.jar))
|
||||
new_image_name=$(basename "${new_jar/.jar/_rubikpi3.img}")
|
||||
mv photonvision_rubikpi3 $new_image_name
|
||||
tar -I 'xz -T0' -cf ${new_image_name}.tar.xz $new_image_name --checkpoint=10000 --checkpoint-action=echo='%T'
|
||||
- uses: actions/upload-artifact@v4
|
||||
name: Upload image
|
||||
with:
|
||||
name: image-rubikpi3
|
||||
path: photonvision*.xz
|
||||
release:
|
||||
needs: [build-package, build-image, combine]
|
||||
needs: [build-photonlib-vendorjson, build-package, build-image, build-rubik-image, combine]
|
||||
runs-on: ubuntu-22.04
|
||||
steps:
|
||||
# Download all fat JARs
|
||||
@@ -550,49 +580,25 @@ jobs:
|
||||
|
||||
- run: find
|
||||
# Push to dev release
|
||||
- uses: pyTooling/Actions/releaser@r0
|
||||
- uses: pyTooling/Actions/releaser@r6
|
||||
with:
|
||||
token: ${{ secrets.GITHUB_TOKEN }}
|
||||
tag: 'Dev'
|
||||
rm: true
|
||||
snapshots: false
|
||||
files: |
|
||||
**/*.xz
|
||||
**/*.jar
|
||||
**/*linux*.jar
|
||||
**/*win*.jar
|
||||
**/photonlib*.json
|
||||
**/photonlib*.zip
|
||||
if: github.event_name == 'push'
|
||||
# Upload all jars and xz archives
|
||||
# Split into two uploads to work around max size limits in action-gh-releases
|
||||
# https://github.com/softprops/action-gh-release/issues/353
|
||||
- uses: softprops/action-gh-release@v2.0.9
|
||||
with:
|
||||
files: |
|
||||
**/@(*orangepi5*|*rock5*).xz
|
||||
if: startsWith(github.ref, 'refs/tags/v')
|
||||
env:
|
||||
GITHUB_TOKEN: ${{ secrets.GITHUB_TOKEN }}
|
||||
- uses: softprops/action-gh-release@v2.0.9
|
||||
with:
|
||||
files: |
|
||||
**/!(*orangepi5*|*rock5*).xz
|
||||
**/*.jar
|
||||
**/photonlib*.json
|
||||
**/photonlib*.zip
|
||||
if: startsWith(github.ref, 'refs/tags/v')
|
||||
env:
|
||||
GITHUB_TOKEN: ${{ secrets.GITHUB_TOKEN }}
|
||||
|
||||
dispatch:
|
||||
name: dispatch
|
||||
needs: [build-photonlib-vendorjson, release]
|
||||
runs-on: ubuntu-22.04
|
||||
steps:
|
||||
- uses: peter-evans/repository-dispatch@v3
|
||||
if: |
|
||||
github.repository == 'PhotonVision/photonvision' &&
|
||||
startsWith(github.ref, 'refs/tags/v')
|
||||
- name: Create Vendor JSON Repo PR
|
||||
uses: wpilibsuite/vendor-json-repo/.github/actions/add_vendordep@main
|
||||
with:
|
||||
repo: PhotonVision/vendor-json-repo
|
||||
token: ${{ secrets.VENDOR_JSON_REPO_PUSH_TOKEN }}
|
||||
repository: PhotonVision/vendor-json-repo
|
||||
event-type: tag
|
||||
client-payload: '{"run_id": "${{ github.run_id }}", "package_version": "${{ github.ref_name }}"}'
|
||||
vendordep_file: ${{ github.workspace }}/photonlib-${{ github.ref_name }}.json
|
||||
pr_title: Update photonlib to ${{ github.ref_name }}
|
||||
pr_branch: photonlib-${{ github.ref_name }}
|
||||
if: github.repository == 'PhotonVision/photonvision' && startsWith(github.ref, 'refs/tags/v')
|
||||
|
||||
17
.github/workflows/cut-new-tag.yml
vendored
@@ -1,17 +0,0 @@
|
||||
name: Cut a new tag
|
||||
|
||||
on:
|
||||
workflow_dispatch:
|
||||
inputs:
|
||||
tag_name:
|
||||
type: string
|
||||
description: The full name of the new tag to push to the latest commit to main
|
||||
|
||||
jobs:
|
||||
push_tag:
|
||||
runs-on: ubuntu-latest
|
||||
|
||||
steps:
|
||||
- uses: actions/checkout@v4
|
||||
- run: git tag ${{ github.event.inputs.tag_name }}
|
||||
- run: git push origin ${{ github.event.inputs.tag_name }}
|
||||
14
.github/workflows/labeler.yml
vendored
Normal file
@@ -0,0 +1,14 @@
|
||||
name: "Pull Request Labeler"
|
||||
on:
|
||||
- pull_request_target
|
||||
|
||||
jobs:
|
||||
labeler:
|
||||
permissions:
|
||||
contents: read
|
||||
pull-requests: write
|
||||
runs-on: ubuntu-latest
|
||||
steps:
|
||||
- uses: actions/labeler@v5
|
||||
with:
|
||||
sync-labels: true
|
||||
40
.github/workflows/lint-format.yml
vendored
@@ -3,18 +3,19 @@ name: Lint and Format
|
||||
on:
|
||||
# Run on pushes to main and pushed tags, and on pull requests against main, but ignore the docs folder
|
||||
push:
|
||||
branches: [ main ]
|
||||
tags:
|
||||
- 'v*'
|
||||
pull_request:
|
||||
branches: [ main ]
|
||||
merge_group:
|
||||
|
||||
concurrency:
|
||||
group: ${{ github.workflow }}-${{ github.head_ref || github.ref }}
|
||||
cancel-in-progress: true
|
||||
|
||||
jobs:
|
||||
validation:
|
||||
name: "Validation"
|
||||
runs-on: ubuntu-latest
|
||||
steps:
|
||||
- uses: actions/checkout@v4
|
||||
- uses: gradle/actions/wrapper-validation@v4
|
||||
wpiformat:
|
||||
name: "wpiformat"
|
||||
runs-on: ubuntu-22.04
|
||||
@@ -30,7 +31,7 @@ jobs:
|
||||
with:
|
||||
python-version: 3.11
|
||||
- name: Install wpiformat
|
||||
run: pip3 install wpiformat==2024.45
|
||||
run: pip3 install wpiformat==2025.75
|
||||
- name: Run
|
||||
run: wpiformat
|
||||
- name: Check output
|
||||
@@ -45,6 +46,7 @@ jobs:
|
||||
if: ${{ failure() }}
|
||||
javaformat:
|
||||
name: "Java Formatting"
|
||||
needs: [validation]
|
||||
runs-on: ubuntu-22.04
|
||||
steps:
|
||||
- uses: actions/checkout@v4
|
||||
@@ -65,25 +67,19 @@ jobs:
|
||||
runs-on: ubuntu-22.04
|
||||
steps:
|
||||
- uses: actions/checkout@v4
|
||||
- name: Install pnpm
|
||||
uses: pnpm/action-setup@v4
|
||||
with:
|
||||
version: 10
|
||||
- name: Setup Node.js
|
||||
uses: actions/setup-node@v4
|
||||
with:
|
||||
node-version: 18
|
||||
node-version: 22
|
||||
cache: pnpm
|
||||
cache-dependency-path: photon-client/pnpm-lock.yaml
|
||||
- name: Install Dependencies
|
||||
run: npm ci
|
||||
run: pnpm i --frozen-lockfile
|
||||
- name: Check Linting
|
||||
run: npm run lint-ci
|
||||
run: pnpm run lint-ci
|
||||
- name: Check Formatting
|
||||
run: npm run format-ci
|
||||
server-index:
|
||||
name: "Check server index.html not changed"
|
||||
runs-on: ubuntu-22.04
|
||||
steps:
|
||||
- uses: actions/checkout@v4
|
||||
- name: Fetch all history and metadata
|
||||
run: |
|
||||
git fetch --prune --unshallow
|
||||
git checkout -b pr
|
||||
git branch -f main origin/main
|
||||
- name: Check index.html not changed
|
||||
run: git --no-pager diff --exit-code origin/main photon-server/src/main/resources/web/index.html
|
||||
run: pnpm run format-ci
|
||||
|
||||
150
.github/workflows/photon-api-docs.yml
vendored
Normal file
@@ -0,0 +1,150 @@
|
||||
name: Photon API Documentation
|
||||
|
||||
on:
|
||||
# Run on pushes to main and pushed tags, and on pull requests against main, but ignore the docs folder
|
||||
push:
|
||||
pull_request:
|
||||
|
||||
concurrency:
|
||||
group: ${{ github.workflow }}-${{ github.head_ref || github.ref }}
|
||||
cancel-in-progress: true
|
||||
|
||||
# Sets permissions of the GITHUB_TOKEN to allow deployment to GitHub Pages
|
||||
permissions:
|
||||
contents: read
|
||||
pages: write
|
||||
id-token: write
|
||||
|
||||
jobs:
|
||||
validation:
|
||||
name: "Validation"
|
||||
runs-on: ubuntu-latest
|
||||
steps:
|
||||
- uses: actions/checkout@v4
|
||||
- uses: gradle/actions/wrapper-validation@v4
|
||||
build_demo:
|
||||
name: Build PhotonClient Demo
|
||||
defaults:
|
||||
run:
|
||||
working-directory: photon-client
|
||||
runs-on: ubuntu-22.04
|
||||
steps:
|
||||
- uses: actions/checkout@v4
|
||||
- name: Install pnpm
|
||||
uses: pnpm/action-setup@v4
|
||||
with:
|
||||
version: 10
|
||||
- name: Setup Node.js
|
||||
uses: actions/setup-node@v4
|
||||
with:
|
||||
node-version: 22
|
||||
cache: pnpm
|
||||
cache-dependency-path: photon-client/pnpm-lock.yaml
|
||||
- name: Install Dependencies
|
||||
run: pnpm i --frozen-lockfile
|
||||
- name: Build Production Client
|
||||
run: pnpm run build-demo
|
||||
- uses: actions/upload-artifact@v4
|
||||
with:
|
||||
name: demo
|
||||
path: photon-client/dist/
|
||||
|
||||
run_java_cpp_docs:
|
||||
name: Build Java and C++ API Docs
|
||||
needs: [validation]
|
||||
runs-on: "ubuntu-22.04"
|
||||
steps:
|
||||
- name: Checkout code
|
||||
uses: actions/checkout@v4
|
||||
with:
|
||||
fetch-depth: 0
|
||||
- name: Fetch tags
|
||||
run: git fetch --tags --force
|
||||
- name: Install Java 17
|
||||
uses: actions/setup-java@v4
|
||||
with:
|
||||
java-version: 17
|
||||
distribution: temurin
|
||||
- name: Build javadocs/doxygen
|
||||
run: |
|
||||
chmod +x gradlew
|
||||
./gradlew photon-docs:generateJavaDocs photon-docs:doxygen
|
||||
- uses: actions/upload-artifact@v4
|
||||
with:
|
||||
name: docs-java-cpp
|
||||
path: photon-docs/build/docs
|
||||
|
||||
run_py_docs:
|
||||
name: Build Python API Docs
|
||||
runs-on: ubuntu-latest
|
||||
|
||||
steps:
|
||||
- name: Checkout code
|
||||
uses: actions/checkout@v4
|
||||
|
||||
- name: Set up Python
|
||||
uses: actions/setup-python@v5
|
||||
with:
|
||||
python-version: '3.10'
|
||||
|
||||
- name: Install dependencies
|
||||
run: |
|
||||
python -m pip install --upgrade pip
|
||||
pip install -r photon-lib/py/docs/requirements.txt
|
||||
|
||||
- name: Build Sphinx site
|
||||
run: |
|
||||
sphinx-apidoc -o docs/source photonlibpy
|
||||
make -C docs html
|
||||
working-directory: photon-lib/py
|
||||
|
||||
- name: Upload built site as artifact
|
||||
uses: actions/upload-artifact@v4
|
||||
with:
|
||||
name: docs-python
|
||||
path: photon-lib/py/docs/build/html
|
||||
|
||||
publish_api_docs:
|
||||
name: Publish API Docs
|
||||
needs: [ run_java_cpp_docs, run_py_docs ]
|
||||
runs-on: ubuntu-22.04
|
||||
steps:
|
||||
# Download docs artifact
|
||||
- uses: actions/download-artifact@v4
|
||||
with:
|
||||
pattern: docs-*
|
||||
- run: find .
|
||||
- name: Publish Docs To Development
|
||||
# if: github.ref == 'refs/heads/main'
|
||||
uses: up9cloud/action-rsync@v1.4
|
||||
env:
|
||||
HOST: ${{ secrets.WEBMASTER_SSH_HOST }}
|
||||
USER: ${{ secrets.WEBMASTER_SSH_USERNAME }}
|
||||
KEY: ${{secrets.WEBMASTER_SSH_KEY}}
|
||||
TARGET: /var/www/html/photonvision-docs/development/
|
||||
- name: Publish Docs To Release
|
||||
if: startsWith(github.ref, 'refs/tags/v')
|
||||
uses: up9cloud/action-rsync@v1.4
|
||||
env:
|
||||
HOST: ${{ secrets.WEBMASTER_SSH_HOST }}
|
||||
USER: ${{ secrets.WEBMASTER_SSH_USERNAME }}
|
||||
KEY: ${{ secrets.WEBMASTER_SSH_KEY }}
|
||||
TARGET: /var/www/html/photonvision-docs/release/
|
||||
|
||||
publish_demo:
|
||||
name: Publish PhotonClient Demo
|
||||
needs: [build_demo]
|
||||
runs-on: ubuntu-22.04
|
||||
steps:
|
||||
- uses: actions/download-artifact@v4
|
||||
with:
|
||||
name: demo
|
||||
- run: find .
|
||||
- name: Publish demo
|
||||
if: github.ref == 'refs/heads/main'
|
||||
uses: up9cloud/action-rsync@v1.4
|
||||
env:
|
||||
HOST: ${{ secrets.WEBMASTER_SSH_HOST }}
|
||||
USER: ${{ secrets.WEBMASTER_SSH_USERNAME }}
|
||||
KEY: ${{ secrets.WEBMASTER_SSH_KEY }}
|
||||
TARGET: /var/www/html/photonvision-demo
|
||||
89
.github/workflows/photon-code-docs.yml
vendored
@@ -1,89 +0,0 @@
|
||||
name: Photon Code Documentation
|
||||
|
||||
on:
|
||||
# Run on pushes to main and pushed tags, and on pull requests against main, but ignore the docs folder
|
||||
push:
|
||||
branches: [ main ]
|
||||
tags:
|
||||
- 'v*'
|
||||
pull_request:
|
||||
branches: [ main ]
|
||||
merge_group:
|
||||
|
||||
concurrency:
|
||||
group: ${{ github.workflow }}-${{ github.head_ref || github.ref }}
|
||||
cancel-in-progress: true
|
||||
|
||||
# Sets permissions of the GITHUB_TOKEN to allow deployment to GitHub Pages
|
||||
permissions:
|
||||
contents: read
|
||||
pages: write
|
||||
id-token: write
|
||||
|
||||
jobs:
|
||||
build-client:
|
||||
name: "PhotonClient Build"
|
||||
defaults:
|
||||
run:
|
||||
working-directory: photon-client
|
||||
runs-on: ubuntu-22.04
|
||||
steps:
|
||||
- uses: actions/checkout@v4
|
||||
- name: Setup Node.js
|
||||
uses: actions/setup-node@v4
|
||||
with:
|
||||
node-version: 18
|
||||
- name: Install Dependencies
|
||||
run: npm ci
|
||||
- name: Build Production Client
|
||||
run: npm run build-demo
|
||||
- uses: actions/upload-artifact@v4
|
||||
with:
|
||||
name: built-client
|
||||
path: photon-client/dist/
|
||||
|
||||
run_docs:
|
||||
runs-on: "ubuntu-22.04"
|
||||
steps:
|
||||
- name: Checkout code
|
||||
uses: actions/checkout@v4
|
||||
with:
|
||||
fetch-depth: 0
|
||||
- name: Fetch tags
|
||||
run: git fetch --tags --force
|
||||
- name: Install Java 17
|
||||
uses: actions/setup-java@v4
|
||||
with:
|
||||
java-version: 17
|
||||
distribution: temurin
|
||||
|
||||
- name: Build javadocs/doxygen
|
||||
run: |
|
||||
chmod +x gradlew
|
||||
./gradlew photon-docs:generateJavaDocs photon-docs:doxygen
|
||||
|
||||
- uses: actions/upload-artifact@v4
|
||||
with:
|
||||
name: built-docs
|
||||
path: photon-docs/build/docs
|
||||
|
||||
release:
|
||||
needs: [build-client, run_docs]
|
||||
|
||||
runs-on: ubuntu-22.04
|
||||
steps:
|
||||
|
||||
# Download literally every single artifact.
|
||||
- uses: actions/download-artifact@v4
|
||||
|
||||
- run: find .
|
||||
- name: copy file via ssh password
|
||||
if: github.ref == 'refs/heads/main'
|
||||
uses: appleboy/scp-action@v0.1.7
|
||||
with:
|
||||
host: ${{ secrets.WEBMASTER_SSH_HOST }}
|
||||
username: ${{ secrets.WEBMASTER_SSH_USERNAME }}
|
||||
password: ${{ secrets.WEBMASTER_SSH_KEY }}
|
||||
port: ${{ secrets.WEBMASTER_SSH_PORT }}
|
||||
source: "*"
|
||||
target: /var/www/html/photonvision-docs/
|
||||
@@ -1,11 +1,8 @@
|
||||
name: PhotonVision Sphinx Documentation Checks
|
||||
name: PhotonVision ReadTheDocs Checks
|
||||
|
||||
on:
|
||||
push:
|
||||
branches: [ main ]
|
||||
pull_request:
|
||||
branches: [ main ]
|
||||
merge_group:
|
||||
|
||||
concurrency:
|
||||
group: ${{ github.workflow }}-${{ github.head_ref || github.ref }}
|
||||
@@ -16,6 +13,7 @@ env:
|
||||
|
||||
jobs:
|
||||
build:
|
||||
name: Build and Check Docs
|
||||
runs-on: ubuntu-22.04
|
||||
|
||||
steps:
|
||||
22
.github/workflows/python.yml
vendored
@@ -5,12 +5,7 @@ permissions:
|
||||
|
||||
on:
|
||||
push:
|
||||
branches: [ main ]
|
||||
tags:
|
||||
- 'v*'
|
||||
pull_request:
|
||||
branches: [ main ]
|
||||
merge_group:
|
||||
|
||||
concurrency:
|
||||
group: ${{ github.workflow }}-${{ github.head_ref || github.ref }}
|
||||
@@ -34,7 +29,7 @@ jobs:
|
||||
- name: Install dependencies
|
||||
run: |
|
||||
python -m pip install --upgrade pip
|
||||
pip install setuptools wheel pytest mypy
|
||||
pip install setuptools wheel pytest mypy mkdocs mkdocs-gen-files
|
||||
|
||||
- name: Build wheel
|
||||
working-directory: ./photon-lib/py
|
||||
@@ -47,13 +42,14 @@ jobs:
|
||||
pip install --no-cache-dir dist/*.whl
|
||||
pytest
|
||||
|
||||
- name: Run mypy type checking
|
||||
uses: liskin/gh-problem-matcher-wrap@v3
|
||||
with:
|
||||
linters: mypy
|
||||
run: |
|
||||
mypy --show-column-numbers --config-file photon-lib/py/pyproject.toml photon-lib
|
||||
|
||||
# Disable due to robotpy issue. See
|
||||
# https://github.com/PhotonVision/photonvision/issues/1968
|
||||
# - name: Run mypy type checking
|
||||
# uses: liskin/gh-problem-matcher-wrap@v3
|
||||
# with:
|
||||
# linters: mypy
|
||||
# run: |
|
||||
# mypy --show-column-numbers --config-file photon-lib/py/pyproject.toml photon-lib
|
||||
|
||||
- name: Upload artifacts
|
||||
uses: actions/upload-artifact@master
|
||||
|
||||
58
.github/workflows/website.yml
vendored
Normal file
@@ -0,0 +1,58 @@
|
||||
name: Website
|
||||
|
||||
on:
|
||||
push:
|
||||
pull_request:
|
||||
|
||||
jobs:
|
||||
rsync:
|
||||
name: Build and Sync Files
|
||||
runs-on: ubuntu-latest
|
||||
steps:
|
||||
- uses: actions/checkout@v4
|
||||
- name: Install pnpm
|
||||
uses: pnpm/action-setup@v4
|
||||
with:
|
||||
version: 10
|
||||
- name: Setup Node
|
||||
uses: actions/setup-node@v4
|
||||
with:
|
||||
node-version: 22
|
||||
cache: pnpm
|
||||
cache-dependency-path: website/pnpm-lock.yaml
|
||||
- name: Install packages
|
||||
run: pnpm i --frozen-lockfile
|
||||
working-directory: website
|
||||
- name: Build project
|
||||
run: pnpm run build
|
||||
working-directory: website
|
||||
- uses: up9cloud/action-rsync@v1.4
|
||||
if: github.ref == 'refs/heads/main'
|
||||
env:
|
||||
HOST: ${{ secrets.WEBMASTER_SSH_HOST }}
|
||||
USER: ${{ secrets.WEBMASTER_SSH_USERNAME }}
|
||||
KEY: ${{secrets.WEBMASTER_SSH_KEY}}
|
||||
SOURCE: website/dist/*
|
||||
TARGET: /var/www/html/photonvision-website
|
||||
|
||||
format-check:
|
||||
name: Check Formatting
|
||||
runs-on: ubuntu-latest
|
||||
steps:
|
||||
- uses: actions/checkout@v4
|
||||
- name: Install pnpm
|
||||
uses: pnpm/action-setup@v4
|
||||
with:
|
||||
version: 10
|
||||
- name: Setup Node
|
||||
uses: actions/setup-node@v4
|
||||
with:
|
||||
node-version: 22
|
||||
cache: pnpm
|
||||
cache-dependency-path: website/pnpm-lock.yaml
|
||||
- name: Install Packages
|
||||
run: pnpm i --frozen-lockfile
|
||||
working-directory: website
|
||||
- name: Run Formatting Check
|
||||
run: pnpm prettier -c .
|
||||
working-directory: website
|
||||
30
.gitignore
vendored
@@ -1,19 +1,14 @@
|
||||
Python/__pycache__/WebSiteHandler\.cpython-37\.pyc
|
||||
|
||||
\.idea/
|
||||
|
||||
*.pyc
|
||||
|
||||
Python/app/__pycache__/
|
||||
|
||||
Python/app/handlers/__pycache__/
|
||||
|
||||
\.vscode/
|
||||
__pycache__/
|
||||
|
||||
/.vs
|
||||
|
||||
backend/settings/
|
||||
/.vscode/
|
||||
.vscode/*
|
||||
!.vscode/settings.json
|
||||
# Docs
|
||||
_build
|
||||
# Compiled class file
|
||||
*.class
|
||||
|
||||
@@ -109,7 +104,6 @@ fabric.properties
|
||||
|
||||
# Temporary build files
|
||||
**/.gradle
|
||||
**/target
|
||||
**/src/main/java/META-INF
|
||||
**/.settings
|
||||
**/.classpath
|
||||
@@ -125,8 +119,6 @@ compile_commands.json
|
||||
.clangd/
|
||||
.cache/
|
||||
|
||||
New client/photon-client/*
|
||||
|
||||
*.prefs
|
||||
*.jfr
|
||||
.DS_Store
|
||||
@@ -146,7 +138,17 @@ photonlib-cpp-examples/*/vendordeps/*
|
||||
photonlib-cpp-examples/*/networktables.json.bck
|
||||
photonlib-java-examples/*/networktables.json.bck
|
||||
*.sqlite
|
||||
photon-server/src/main/resources/web/*
|
||||
venv
|
||||
.venv/*
|
||||
.venv
|
||||
networktables.json
|
||||
|
||||
# Web stuff
|
||||
photon-server/src/main/resources/web/*
|
||||
node_modules
|
||||
dist
|
||||
components.d.ts
|
||||
|
||||
# Py docs stuff
|
||||
photon-lib/py/docs/build
|
||||
photon-server/src/main/resources/web/index.html
|
||||
|
||||
1
.python-version
Normal file
@@ -0,0 +1 @@
|
||||
3.11
|
||||
5
.vscode/settings.json
vendored
Normal file
@@ -0,0 +1,5 @@
|
||||
{
|
||||
"python.testing.unittestEnabled": false,
|
||||
"python.testing.pytestEnabled": true,
|
||||
"python.testing.cwd": "photon-lib/py"
|
||||
}
|
||||
@@ -1,37 +1,25 @@
|
||||
cppHeaderFileInclude {
|
||||
\.h$
|
||||
\.hpp$
|
||||
\.inc$
|
||||
\.inl$
|
||||
}
|
||||
|
||||
cppSrcFileInclude {
|
||||
\.cpp$
|
||||
}
|
||||
|
||||
modifiableFileExclude {
|
||||
\.jpg$
|
||||
\.jpeg$
|
||||
\.png$
|
||||
\.gif$
|
||||
\.so$
|
||||
\.dll$
|
||||
\.webp$
|
||||
\.gif$
|
||||
\.ico$
|
||||
\.jpeg$
|
||||
\.jpg$
|
||||
\.mp4$
|
||||
\.pdf$
|
||||
\.png$
|
||||
\.rknn$
|
||||
\.so$
|
||||
\.svg$
|
||||
\.tflite$
|
||||
\.ttf$
|
||||
\.webp$
|
||||
\.woff2$
|
||||
gradlew
|
||||
photon-lib/py/photonlibpy/generated/
|
||||
photon-targeting/src/main/native/cpp/photon/constrained_solvepnp/generate/
|
||||
photon-targeting/src/generated/
|
||||
}
|
||||
|
||||
includeProject {
|
||||
^photonLib/
|
||||
}
|
||||
|
||||
includeOtherLibs {
|
||||
^frc/
|
||||
^networktables/
|
||||
^units/
|
||||
^wpi/
|
||||
photon-targeting/src/main/native/cpp/photon/constrained_solvepnp/generate/
|
||||
}
|
||||
12
README.md
@@ -17,13 +17,14 @@ If you are interested in contributing code or documentation to the project, plea
|
||||
## Documentation
|
||||
|
||||
- Our main documentation page: [docs.photonvision.org](https://docs.photonvision.org)
|
||||
- Photon UI demo: [http://photonvision.global/](http://photonvision.global/) (or [manual link](https://photonvision.github.io/photonvision/built-client/))
|
||||
- Javadocs: [javadocs.photonvision.org](https://javadocs.photonvision.org) (or [manual link](https://photonvision.github.io/photonvision/built-docs/javadoc/))
|
||||
- C++ Doxygen [cppdocs.photonvision.org](https://cppdocs.photonvision.org) (or [manual link](https://photonvision.github.io/photonvision/built-docs/doxygen/html/))
|
||||
- Photon UI demo: [http://photonvision.global/](http://photonvision.global/)
|
||||
- Javadocs: [javadocs.photonvision.org](https://javadocs.photonvision.org)
|
||||
- C++ Doxygen [cppdocs.photonvision.org](https://cppdocs.photonvision.org)
|
||||
- Python Documentation [pydocs.photonvision.org](https://pydocs.photonvision.org)
|
||||
|
||||
## Building
|
||||
|
||||
Gradle is used for all C++ and Java code, and NPM is used for the web UI. Instructions to compile PhotonVision yourself can be found [in our docs](https://docs.photonvision.org/en/latest/docs/contributing/building-photon.html#compiling-instructions).
|
||||
Gradle is used for all C++ and Java code, and pnpm is used for the web UI. Instructions to compile PhotonVision yourself can be found [in our docs](https://docs.photonvision.org/en/latest/docs/contributing/building-photon.html#compiling-instructions).
|
||||
|
||||
You can run one of the many built in examples straight from the command line, too! They contain a fully featured robot project, and some include simulation support. The projects can be found inside the [`photonlib-java-examples`](photonlib-java-examples) and [`photonlib-cpp-examples`](photonlib-cpp-examples) subdirectories, respectively. Instructions for running these examples directly from the repo are found [in the docs](https://docs.photonvision.org/en/latest/docs/contributing/building-photon.html#running-examples).
|
||||
|
||||
@@ -41,7 +42,10 @@ Note that these are case sensitive!
|
||||
* linuxarm64
|
||||
* linuxathena
|
||||
- `-PtgtIP`: Specifies where `./gradlew deploy` should try to copy the fat JAR to
|
||||
- `-PtgtUser`: Specifies custom username for `./gradlew deploy` to SSH into
|
||||
- `-PtgtPw`: Specifies custom password for `./gradlew deploy` to SSH into
|
||||
- `-Pprofile`: enables JVM profiling
|
||||
- `-PwithSanitizers`: On Linux, enables `-fsanitize=address,undefined,leak`
|
||||
|
||||
If you're cross-compiling, you'll need the wpilib toolchain installed. This can be done via Gradle: for example `./gradlew installArm64Toolchain` or `./gradlew installRoboRioToolchain`
|
||||
|
||||
|
||||
19
build.gradle
@@ -4,14 +4,13 @@ plugins {
|
||||
id "cpp"
|
||||
id "com.diffplug.spotless" version "6.24.0"
|
||||
id "edu.wpi.first.wpilib.repositories.WPILibRepositoriesPlugin" version "2020.2"
|
||||
id "edu.wpi.first.GradleRIO" version "2025.3.1"
|
||||
id "edu.wpi.first.GradleRIO" version "2025.3.2"
|
||||
id 'edu.wpi.first.WpilibTools' version '1.3.0'
|
||||
id 'com.google.protobuf' version '0.9.3' apply false
|
||||
id 'edu.wpi.first.GradleJni' version '1.1.0'
|
||||
id "org.ysb33r.doxygen" version "1.0.4" apply false
|
||||
id "org.ysb33r.doxygen" version "2.0.0" apply false
|
||||
id 'com.gradleup.shadow' version '8.3.4' apply false
|
||||
id "com.github.node-gradle.node" version "7.0.1" apply false
|
||||
id "org.hidetake.ssh" version "2.11.2" apply false
|
||||
}
|
||||
|
||||
allprojects {
|
||||
@@ -33,14 +32,14 @@ ext.allOutputsFolder = file("$project.buildDir/outputs")
|
||||
apply from: "versioningHelper.gradle"
|
||||
|
||||
ext {
|
||||
wpilibVersion = "2025.3.1"
|
||||
wpilibVersion = "2025.3.2"
|
||||
wpimathVersion = wpilibVersion
|
||||
openCVYear = "2025"
|
||||
openCVversion = "4.10.0-3"
|
||||
joglVersion = "2.4.0"
|
||||
javalinVersion = "5.6.2"
|
||||
libcameraDriverVersion = "v2025.0.3"
|
||||
rknnVersion = "dev-v2025.0.0-1-g33b6263"
|
||||
javalinVersion = "6.7.0"
|
||||
libcameraDriverVersion = "v2025.0.4"
|
||||
rknnVersion = "dev-v2025.0.0-5-g666c0c6"
|
||||
rubikVersion = "dev-v2025.1.0-6-g4a5e508"
|
||||
frcYear = "2025"
|
||||
mrcalVersion = "v2025.0.0";
|
||||
|
||||
@@ -93,7 +92,7 @@ spotless {
|
||||
format 'misc', {
|
||||
target fileTree('.') {
|
||||
include '**/*.md', '**/.gitignore'
|
||||
exclude '**/build/**', '**/build-*/**'
|
||||
exclude '**/build/**', '**/build-*/**', '**/node_modules/**'
|
||||
}
|
||||
trimTrailingWhitespace()
|
||||
indentWithSpaces(2)
|
||||
@@ -102,7 +101,7 @@ spotless {
|
||||
}
|
||||
|
||||
wrapper {
|
||||
gradleVersion '8.11'
|
||||
gradleVersion = '8.14.3'
|
||||
}
|
||||
|
||||
ext.getCurrentArch = {
|
||||
|
||||
@@ -1,10 +1,8 @@
|
||||
import argparse
|
||||
import base64
|
||||
import json
|
||||
import os
|
||||
from dataclasses import dataclass
|
||||
|
||||
import cv2
|
||||
import mrcal
|
||||
import numpy as np
|
||||
from wpimath.geometry import Quaternion as _Quat
|
||||
@@ -12,8 +10,8 @@ from wpimath.geometry import Quaternion as _Quat
|
||||
|
||||
@dataclass
|
||||
class Size:
|
||||
width: int
|
||||
height: int
|
||||
width: float
|
||||
height: float
|
||||
|
||||
|
||||
@dataclass
|
||||
@@ -24,14 +22,6 @@ class JsonMatOfDoubles:
|
||||
data: list[float]
|
||||
|
||||
|
||||
@dataclass
|
||||
class JsonMat:
|
||||
rows: int
|
||||
cols: int
|
||||
type: int
|
||||
data: str # Base64-encoded PNG data
|
||||
|
||||
|
||||
@dataclass
|
||||
class Point2:
|
||||
x: float
|
||||
@@ -84,8 +74,7 @@ class Observation:
|
||||
# If we should use this observation when re-calculating camera calibration
|
||||
includeObservationInCalibration: bool
|
||||
snapshotName: str
|
||||
# The actual image the snapshot is from
|
||||
snapshotData: JsonMat
|
||||
snapshotDataLocation: str
|
||||
|
||||
|
||||
@dataclass
|
||||
@@ -97,6 +86,7 @@ class CameraCalibration:
|
||||
calobjectWarp: list[float]
|
||||
calobjectSize: Size
|
||||
calobjectSpacing: float
|
||||
lensmodel: str
|
||||
|
||||
|
||||
def __convert_cal_to_mrcal_cameramodel(
|
||||
@@ -127,6 +117,13 @@ def __convert_cal_to_mrcal_cameramodel(
|
||||
]
|
||||
return np.concatenate((r, t))
|
||||
|
||||
imagersize = (int(cal.resolution.width), int(cal.resolution.height))
|
||||
|
||||
def fill_missing_corners(observations: list[list[float]], width: int, height: int):
|
||||
num_corners = width * height
|
||||
observations += [[0, 0, -1] for x in range(num_corners - len(observations))]
|
||||
return observations
|
||||
|
||||
imagersize = (cal.resolution.width, cal.resolution.height)
|
||||
|
||||
# Always weight=1 for Photon data
|
||||
@@ -135,8 +132,12 @@ def __convert_cal_to_mrcal_cameramodel(
|
||||
[
|
||||
# note that we expect row-major observations here. I think this holds
|
||||
np.array(
|
||||
list(map(lambda it: [it.x, it.y, WEIGHT], o.locationInImageSpace))
|
||||
).reshape((cal.calobjectSize.width, cal.calobjectSize.height, 3))
|
||||
fill_missing_corners(
|
||||
list(map(lambda it: [it.x, it.y, WEIGHT], o.locationInImageSpace)),
|
||||
int(cal.calobjectSize.width),
|
||||
int(cal.calobjectSize.height),
|
||||
)
|
||||
).reshape((int(cal.calobjectSize.width), int(cal.calobjectSize.height), 3))
|
||||
for o in cal.observations
|
||||
]
|
||||
)
|
||||
@@ -206,14 +207,6 @@ def convert_photon_to_mrcal(photon_cal_json_path: str, output_folder: str):
|
||||
if not os.path.exists(output_folder):
|
||||
os.makedirs(output_folder)
|
||||
|
||||
# Decode each image and save it as a png
|
||||
for obs in camera_cal_data.observations:
|
||||
image = obs.snapshotData.data
|
||||
decoded_data = base64.b64decode(image)
|
||||
np_data = np.frombuffer(decoded_data, np.uint8)
|
||||
img = cv2.imdecode(np_data, cv2.IMREAD_UNCHANGED)
|
||||
cv2.imwrite(f"{output_folder}/{obs.snapshotName}", img)
|
||||
|
||||
# And create a VNL file for use with mrcal
|
||||
with open(f"{output_folder}/corners.vnl", "w+") as vnl_file:
|
||||
vnl_file.write("# filename x y level\n")
|
||||
|
||||
9
docs/.gitignore
vendored
@@ -1,9 +0,0 @@
|
||||
build/*
|
||||
.DS_Store
|
||||
.vscode/*
|
||||
.idea/*
|
||||
source/_build
|
||||
source/docs/_build
|
||||
|
||||
venv/*
|
||||
.venv/*
|
||||
@@ -1,17 +0,0 @@
|
||||
|
||||
modifiableFileExclude {
|
||||
\.jpg$
|
||||
\.jpeg$
|
||||
\.png$
|
||||
\.gif$
|
||||
\.so$
|
||||
\.pdf$
|
||||
\.mp4$
|
||||
\.dll$
|
||||
\.webp$
|
||||
\.ico$
|
||||
\.rknn$
|
||||
\.svg$
|
||||
\.woff2$
|
||||
gradlew
|
||||
}
|
||||
@@ -1,44 +1,59 @@
|
||||
alabaster==0.7.13
|
||||
Babel==2.13.1
|
||||
beautifulsoup4==4.12.2
|
||||
certifi==2023.11.17
|
||||
charset-normalizer==3.3.2
|
||||
alabaster==0.7.16
|
||||
anyio==4.9.0
|
||||
babel==2.17.0
|
||||
beautifulsoup4==4.13.4
|
||||
certifi==2025.4.26
|
||||
charset-normalizer==3.4.2
|
||||
click==8.1.8
|
||||
colorama==0.4.6
|
||||
doc8==0.11.2
|
||||
doc8==1.1.2
|
||||
docopt==0.6.2
|
||||
docutils==0.18.1
|
||||
furo==2023.9.10
|
||||
idna==3.4
|
||||
docutils==0.20.1
|
||||
furo==2024.8.6
|
||||
h11==0.16.0
|
||||
idna==3.10
|
||||
imagesize==1.4.1
|
||||
Jinja2==3.0.3
|
||||
MarkupSafe==2.1.3
|
||||
packaging==23.2
|
||||
pbr==6.0.0
|
||||
pipreqs==0.4.13
|
||||
Pygments==2.17.1
|
||||
requests==2.31.0
|
||||
Jinja2==3.1.6
|
||||
markdown-it-py==3.0.0
|
||||
MarkupSafe==3.0.2
|
||||
mdit-py-plugins==0.4.2
|
||||
mdurl==0.1.2
|
||||
myst-parser==4.0.1
|
||||
packaging==25.0
|
||||
pbr==6.1.1
|
||||
pipreqs==0.5.0
|
||||
Pygments==2.19.1
|
||||
PyYAML==6.0.2
|
||||
requests==2.32.4
|
||||
restructuredtext-lint==1.4.0
|
||||
six==1.16.0
|
||||
snowballstemmer==2.2.0
|
||||
soupsieve==2.5
|
||||
Sphinx==7.2.6
|
||||
roman-numerals-py==3.1.0
|
||||
setuptools==80.3.1
|
||||
six==1.17.0
|
||||
sniffio==1.3.1
|
||||
snowballstemmer==3.0.0.1
|
||||
soupsieve==2.7
|
||||
Sphinx==8.1.3
|
||||
sphinx-autobuild==2024.10.3
|
||||
sphinx-basic-ng==1.0.0b2
|
||||
sphinx-notfound-page==1.0.0
|
||||
sphinx-rtd-theme==1.3.0
|
||||
sphinx-tabs==3.4.4
|
||||
sphinx_design==0.5.0
|
||||
sphinxcontrib-applehelp==1.0.7
|
||||
sphinxcontrib-devhelp==1.0.5
|
||||
sphinx-notfound-page==1.1.0
|
||||
sphinx-rtd-theme==3.0.2
|
||||
sphinx-tabs==3.4.7
|
||||
sphinx_design==0.6.1
|
||||
sphinxcontrib-applehelp==2.0.0
|
||||
sphinxcontrib-devhelp==2.0.0
|
||||
sphinxcontrib-ghcontributors==0.2.3
|
||||
sphinxcontrib-htmlhelp==2.0.4
|
||||
sphinxcontrib-htmlhelp==2.1.0
|
||||
sphinxcontrib-jquery==4.1
|
||||
sphinxcontrib-jsmath==1.0.1
|
||||
sphinxcontrib-qthelp==1.0.6
|
||||
sphinxcontrib-serializinghtml==1.1.9
|
||||
sphinxext-opengraph==0.9.0
|
||||
sphinxext-remoteliteralinclude==0.4.0
|
||||
stevedore==5.1.0
|
||||
urllib3==2.1.0
|
||||
sphinxcontrib-qthelp==2.0.0
|
||||
sphinxcontrib-serializinghtml==2.0.0
|
||||
sphinxext-opengraph==0.10.0
|
||||
sphinxext-remoteliteralinclude==0.5.0
|
||||
starlette==0.47.2
|
||||
stevedore==5.4.1
|
||||
typing_extensions==4.13.2
|
||||
urllib3==2.5.0
|
||||
uvicorn==0.34.2
|
||||
watchfiles==1.0.5
|
||||
websockets==15.0.1
|
||||
yarg==0.1.9
|
||||
sphinx-autobuild==2024.4.16
|
||||
myst_parser==3.0.1
|
||||
|
||||
{kind=link}
|
Before Width: | Height: | Size: 56 KiB After Width: | Height: | Size: 40 KiB |
{kind=link}
|
Before Width: | Height: | Size: 56 KiB After Width: | Height: | Size: 41 KiB |
{kind=link}
|
Before Width: | Height: | Size: 27 KiB After Width: | Height: | Size: 18 KiB |
{kind=link}
|
Before Width: | Height: | Size: 17 KiB After Width: | Height: | Size: 12 KiB |
@@ -1,74 +0,0 @@
|
||||
{# Import the theme's layout. #}
|
||||
{% extends '!layout.html' %}
|
||||
|
||||
{%- block extrahead %}
|
||||
<script>
|
||||
if (localStorage.getItem("colorTheme") === "dark") {
|
||||
document.documentElement.setAttribute('data-theme', 'dark');
|
||||
} else if (localStorage.getItem("colorTheme") === "light") {
|
||||
document.documentElement.setAttribute('data-theme', 'light');
|
||||
} else {
|
||||
var userPrefersDark = window.matchMedia && window.matchMedia('(prefers-color-scheme: dark)').matches;
|
||||
if (userPrefersDark) {
|
||||
document.documentElement.setAttribute('data-theme', 'dark');
|
||||
} else {
|
||||
document.documentElement.setAttribute('data-theme', 'light');
|
||||
}
|
||||
}
|
||||
|
||||
</script>
|
||||
|
||||
{# Call the parent block #}
|
||||
{{ super() }}
|
||||
{% endblock %}
|
||||
|
||||
{%- block extrafooter %}
|
||||
{# Add custom things to the head HTML tag #}
|
||||
|
||||
<div class="dark-mode-toggle-container">
|
||||
<strong class="light-label md-icon"></strong>
|
||||
|
||||
<div class="dark-mode-toggle">
|
||||
<input type="checkbox" id="switch" name="theme"/><label class="toggle" for="switch">Toggle</label>
|
||||
</div>
|
||||
|
||||
<strong class="dark-label md-icon"></strong>
|
||||
</div>
|
||||
|
||||
<script>
|
||||
var checkbox = document.querySelector('input[name=theme]');
|
||||
|
||||
var element = document.documentElement.getAttribute('data-theme');
|
||||
|
||||
if (element == 'dark') {
|
||||
// Auto check the checkbox if the set theme is "dark".
|
||||
checkbox.checked = true;
|
||||
}
|
||||
|
||||
checkbox.addEventListener('change', function() {
|
||||
if (this.checked) {
|
||||
document.documentElement.setAttribute('data-theme', 'dark');
|
||||
localStorage.setItem("colorTheme", "dark");
|
||||
} else {
|
||||
document.documentElement.setAttribute('data-theme', 'light');
|
||||
localStorage.setItem("colorTheme", "light");
|
||||
}
|
||||
});
|
||||
|
||||
window.matchMedia('(prefers-color-scheme: dark)')
|
||||
.addEventListener('change', event => {
|
||||
if (event.matches) {
|
||||
document.documentElement.setAttribute('data-theme', 'dark');
|
||||
localStorage.setItem("colorTheme", "dark");
|
||||
checkbox.checked = true;
|
||||
} else {
|
||||
document.documentElement.setAttribute('data-theme', 'light');
|
||||
localStorage.setItem("colorTheme", "light");
|
||||
checkbox.checked = false;
|
||||
}
|
||||
});
|
||||
</script>
|
||||
|
||||
{# Call the parent block #}
|
||||
{{ super() }}
|
||||
{%- endblock %}
|
||||
{kind=link}
|
Before Width: | Height: | Size: 56 KiB After Width: | Height: | Size: 40 KiB |
{kind=link}
|
Before Width: | Height: | Size: 56 KiB After Width: | Height: | Size: 41 KiB |
{kind=link}
|
Before Width: | Height: | Size: 46 KiB After Width: | Height: | Size: 33 KiB |
{kind=link}
|
Before Width: | Height: | Size: 27 KiB After Width: | Height: | Size: 18 KiB |
{kind=link}
|
Before Width: | Height: | Size: 17 KiB After Width: | Height: | Size: 12 KiB |
@@ -21,6 +21,29 @@ project = "PhotonVision"
|
||||
copyright = "2024, PhotonVision"
|
||||
author = "Banks Troutman, Matt Morley"
|
||||
|
||||
# -- Git configuration -----------------------------------------------------
|
||||
import subprocess
|
||||
|
||||
try:
|
||||
# Use closest tag
|
||||
git_tag_ref = (
|
||||
subprocess.check_output(
|
||||
[
|
||||
"git",
|
||||
"describe",
|
||||
"--tags",
|
||||
],
|
||||
stderr=subprocess.DEVNULL,
|
||||
)
|
||||
.strip()
|
||||
.decode()
|
||||
)
|
||||
except subprocess.CalledProcessError:
|
||||
# Couldn't find closest tag, fallback to main
|
||||
git_tag_ref = "main"
|
||||
|
||||
myst_substitutions = {"git_tag_ref": git_tag_ref}
|
||||
|
||||
# -- General configuration ---------------------------------------------------
|
||||
|
||||
# Add any Sphinx extension module names here, as strings. They can be
|
||||
@@ -30,7 +53,6 @@ extensions = [
|
||||
"sphinx_rtd_theme",
|
||||
"sphinx.ext.autosectionlabel",
|
||||
"sphinx.ext.todo",
|
||||
"sphinx_tabs.tabs",
|
||||
"notfound.extension",
|
||||
"sphinxext.remoteliteralinclude",
|
||||
"sphinxext.opengraph",
|
||||
@@ -47,9 +69,6 @@ ogp_site_url = "https://docs.photonvision.org/en/latest/"
|
||||
ogp_site_name = "PhotonVision Documentation"
|
||||
ogp_image = "https://raw.githubusercontent.com/PhotonVision/photonvision-docs/main/source/assets/RectLogo.png"
|
||||
|
||||
# Add any paths that contain templates here, relative to this directory.
|
||||
templates_path = ["_templates"]
|
||||
|
||||
# List of patterns, relative to source directory, that match files and
|
||||
# directories to ignore when looking for source files.
|
||||
# This pattern also affects html_static_path and html_extra_path.
|
||||
@@ -70,6 +89,10 @@ html_title = "PhotonVision Docs"
|
||||
html_theme = "furo"
|
||||
html_favicon = "assets/RoundLogo.png"
|
||||
|
||||
# Specify canonical root
|
||||
# This tells search engines that this domain is preferred
|
||||
html_baseurl = "https://docs.photonvision.org/en/latest/"
|
||||
|
||||
# Add any paths that contain custom static files (such as style sheets) here,
|
||||
# relative to this directory. They are copied after the builtin static files,
|
||||
# so a file named "default.css" will overwrite the builtin "default.css".
|
||||
@@ -87,6 +110,9 @@ pygments_style = "sphinx"
|
||||
|
||||
html_theme_options = {
|
||||
"sidebar_hide_name": True,
|
||||
"top_of_page_buttons": ["view", "edit"],
|
||||
"source_edit_link": "https://github.com/PhotonVision/photonvision/edit/main/docs/source/{filename}",
|
||||
"source_view_link": "https://github.com/PhotonVision/photonvision/blob/main/docs/source/{filename}",
|
||||
"light_logo": "assets/PhotonVision-Header-onWhite.png",
|
||||
"dark_logo": "assets/PhotonVision-Header-noBG.png",
|
||||
"light_css_variables": {
|
||||
@@ -144,11 +170,15 @@ sphinx_tabs_valid_builders = ["epub", "linkcheck"]
|
||||
|
||||
# Excluded links for linkcheck
|
||||
# These should be periodically checked by hand to ensure that they are still functional
|
||||
linkcheck_ignore = [R"https://www.raspberrypi.com/software/", R"http://10\..+"]
|
||||
linkcheck_ignore = [
|
||||
R"https://www.raspberrypi.com/software/",
|
||||
R"http://10\..+",
|
||||
R"https://www.gnu.org/",
|
||||
]
|
||||
|
||||
token = os.environ.get("GITHUB_TOKEN", None)
|
||||
if token:
|
||||
linkcheck_auth = [(R"https://github.com/.+", token)]
|
||||
|
||||
# MyST configuration (https://myst-parser.readthedocs.io/en/latest/configuration.html)
|
||||
myst_enable_extensions = ["colon_fence"]
|
||||
myst_enable_extensions = ["colon_fence", "substitution"]
|
||||
|
||||
@@ -7,10 +7,14 @@
|
||||
- Some time before the competition, lock down the version you are using and do not upgrade unless you encounter a critical bug.
|
||||
- Have a copy of the installation image for the version you are using on your programming laptop, in case re-imaging (without internet) is needed.
|
||||
- Extensively test at your home setup. Practice tuning from scratch under different lighting conditions.
|
||||
- Use SmartDashboard / Shuffleboard to view your camera streams during practice.
|
||||
- Confirm you have followed all the recommendations under the Networking section in installation (network switch and static IP).
|
||||
- Confirm you have followed all the recommendations under the {ref}`Networking<docs/quick-start/networking:Networking>` documentation (network switch and static IP).
|
||||
- Only use high quality ethernet cables that have been rigorously tested.
|
||||
- Set up RIO USB port forwarding using the guide in the Networking section in installation.
|
||||
|
||||
## Camera Streaming
|
||||
- All camera streams are published under the NetworkTables table `CameraPublisher`.
|
||||
- The only subtable under `CameraPublisher` that will work for viewing a driver mode camera stream is the one that contains `Output` in the name.
|
||||
- To view a camera stream in a dashboard, drag the correct subtable from the NetworkTables tree into your dashboard.
|
||||
- Use the latest driver dashboard recommended by [WPILib](https://docs.wpilib.org/en/stable/docs/software/dashboards/dashboard-intro.html) on your driver station laptop.
|
||||
|
||||
## During the Competition
|
||||
|
||||
@@ -19,7 +23,7 @@
|
||||
- Make sure the field has match-accurate lighting conditions active.
|
||||
- Turn on your robot and pull up the dashboard on your driver station.
|
||||
- Point your robot at the targets and ensure you get a consistent tracking (you hold one targets consistently, the ceiling lights aren't detected, etc.).
|
||||
- If you have problems with your pipeline, go to the pipeline tuning section and retune the pipeline using the guide there.
|
||||
- If you have problems with your pipeline, retune the pipeline following the {ref}`camera tuning <docs/pipelines/input:Camera Tuning / Input>` documentation.
|
||||
- Move the robot close, far, angled, and around the field to ensure no extra targets are found.
|
||||
- Monitor camera feeds during a practice match to ensure everything is working correctly.
|
||||
- After field calibration, use the "Export Settings" button in the "Settings" page to create a backup.
|
||||
|
||||
{kind=link}
|
Before Width: | Height: | Size: 81 KiB After Width: | Height: | Size: 59 KiB |
{kind=link}
|
Before Width: | Height: | Size: 139 KiB After Width: | Height: | Size: 102 KiB |
{kind=link}
|
Before Width: | Height: | Size: 122 KiB After Width: | Height: | Size: 72 KiB |
{kind=link}
|
Before Width: | Height: | Size: 115 KiB After Width: | Height: | Size: 77 KiB |
{kind=link}
|
Before Width: | Height: | Size: 13 KiB After Width: | Height: | Size: 6.8 KiB |
@@ -23,7 +23,7 @@ Using a JDK other than JDK17 will cause issues when running PhotonVision and is
|
||||
Go to the [GitHub releases page](https://github.com/PhotonVision/photonvision/releases) and download the relevant .jar file for your coprocessor.
|
||||
|
||||
:::{note}
|
||||
If you have an M1/M2 Mac, download the macarm64.jar file.
|
||||
If you have an M Series Mac, download the macarm64.jar file.
|
||||
|
||||
If you have an Intel based Mac, download the macx64.jar file.
|
||||
:::
|
||||
|
||||
@@ -12,7 +12,7 @@ Bonjour provides more stable networking when using Windows PCs. Install [Bonjour
|
||||
|
||||
## Installing Java
|
||||
|
||||
PhotonVision requires a JDK installed and on the system path. **JDK 17 is needed. Windows Users must use the JDK that ships with WPILib.** [Download and install it from here.](https://github.com/wpilibsuite/allwpilib/releases/tag/v2025.3.1) Either ensure the only Java on your PATH is the WPILIB Java or specify it to gradle with `-Dorg.gradle.java.home=C:\Users\Public\wpilib\2025\jdk`:
|
||||
PhotonVision requires a JDK installed and on the system path. **JDK 17 is needed. Windows Users must use the JDK that ships with WPILib.** [Download and install it from here.](https://github.com/wpilibsuite/allwpilib/releases/tag/v2025.3.2) Either ensure the only Java on your PATH is the WPILIB Java or specify it to gradle with `-Dorg.gradle.java.home=C:\Users\Public\wpilib\2025\jdk`:
|
||||
|
||||
```
|
||||
> ./gradlew run "-Dorg.gradle.java.home=C:\Users\Public\wpilib\2025\jdk"
|
||||
|
||||
@@ -2,7 +2,7 @@
|
||||
|
||||
## Tracking AprilTags
|
||||
|
||||
Before you get started tracking AprilTags, ensure that you have followed the previous sections on installation, wiring and networking. Next, open the Web UI, go to the top right card, and switch to the "AprilTag" or "Aruco" type. You should see a screen similar to the one below.
|
||||
Before you get started tracking AprilTags, ensure that you have followed the previous sections on installation, wiring and networking. Next, open the Web UI, go to the top right card, and switch to the "AprilTag" or "ArUco" type. You should see a screen similar to the one below.
|
||||
|
||||
```{image} images/apriltag.png
|
||||
:align: center
|
||||
@@ -12,7 +12,7 @@ You are now able to detect and track AprilTags in 2D (yaw, pitch, roll, etc.). I
|
||||
|
||||
## Tuning AprilTags
|
||||
|
||||
AprilTag pipelines come with reasonable defaults to get you up and running with tracking. However, in order to optimize your performance and accuracy, you must tune your AprilTag pipeline using the settings below. Note that the settings below are different between the AprilTag and Aruco detectors but the concepts are the same.
|
||||
AprilTag pipelines come with reasonable defaults to get you up and running with tracking. However, in order to optimize your performance and accuracy, you must tune your AprilTag pipeline using the settings below. Note that the settings below are different between the AprilTag and ArUco detectors but the concepts are the same.
|
||||
|
||||
```{image} images/apriltag-tune.png
|
||||
:align: center
|
||||
|
||||
@@ -1,10 +1,10 @@
|
||||
# 3D Tracking
|
||||
|
||||
3D AprilTag tracking will allow you to track the real-world position and rotation of a tag relative to the camera's image sensor. This is useful for robot pose estimation and other applications like autonomous scoring. In order to use 3D tracking, you must first {ref}`calibrate your camera <docs/calibration/calibration:Calibrating Your Camera>`. Once you have, you need to enable 3D mode in the UI and you will now be able to get 3D pose information from the tag! For information on getting and using this information in your code, see {ref}`the programming reference. <docs/programming/index:Programming Reference>`.
|
||||
3D AprilTag tracking will allow you to track the real-world position and rotation of a tag relative to the camera's image sensor. This is useful for robot pose estimation and other applications like autonomous scoring. In order to use 3D tracking, you must first {ref}`calibrate your camera <docs/calibration/calibration:Calibrating Your Camera>`. Once you have, you need to enable 3D mode in the UI and you will now be able to get 3D pose information from the tag! For information on getting and using this information in your code, see {ref}`the programming reference <docs/programming/index:Programming Reference>`.
|
||||
|
||||
## Ambiguity
|
||||
|
||||
Translating from 2D to 3D using data from the calibration and the four tag corners can lead to "pose ambiguity", where it appears that the AprilTag pose is flipping between two different poses. You can read more about this issue `here. <https://docs.wpilib.org/en/stable/docs/software/vision-processing/apriltag/apriltag-intro.html#d-to-3d-ambiguity>` Ambiguity is calculated as the ratio of reprojection errors between two pose solutions (if they exist), where reprojection error is the error corresponding to the image distance between where the apriltag's corners are detected vs where we expect to see them based on the tag's estimated camera relative pose.
|
||||
Translating from 2D to 3D using data from the calibration and the four tag corners can lead to "pose ambiguity", where it appears that the AprilTag pose is flipping between two different poses. You can read more about this issue [here](https://docs.wpilib.org/en/stable/docs/software/vision-processing/apriltag/apriltag-intro.html#d-to-3d-ambiguity). Ambiguity is calculated as the ratio of reprojection errors between two pose solutions (if they exist), where reprojection error is the error corresponding to the image distance between where the apriltag's corners are detected vs where we expect to see them based on the tag's estimated camera relative pose.
|
||||
|
||||
There are a few steps you can take to resolve/mitigate this issue:
|
||||
|
||||
|
||||
@@ -8,8 +8,8 @@ Note that both of these pipeline types detect AprilTag markers and are just two
|
||||
|
||||
## AprilTag
|
||||
|
||||
The AprilTag pipeline type is based on the [AprilTag](https://april.eecs.umich.edu/software/apriltag.html) library from the University of Michigan and we recommend it for most use cases. It is (to our understanding) most accurate pipeline type, but is also ~2x slower than AruCo. This was the pipeline type used by teams in the 2023 season and is well tested.
|
||||
The AprilTag pipeline type is based on the [AprilTag](https://april.eecs.umich.edu/software/apriltag.html) library from the University of Michigan and we recommend it for most use cases. It is (to our understanding) most accurate pipeline type, but is also ~2x slower than ArUco. This was the pipeline type used by teams in the 2023 season and is well tested.
|
||||
|
||||
## AruCo
|
||||
## ArUco
|
||||
|
||||
The AruCo pipeline is based on the [AruCo](https://docs.opencv.org/4.8.0/d9/d6a/group__aruco.html) library implementation from OpenCV. It is ~2x higher fps and ~2x lower latency than the AprilTag pipeline type, but is less accurate. We recommend this pipeline type for teams that need to run at a higher framerate or have a lower powered device. This pipeline type was new for the 2024 season.
|
||||
The ArUco pipeline is based on the [ArUco](https://docs.opencv.org/4.8.0/d9/d6a/group__aruco.html) library implementation from OpenCV. It is ~2x higher fps and ~2x lower latency than the AprilTag pipeline type, but is less accurate. We recommend this pipeline type for teams that need to run at a higher framerate or have a lower powered device. This pipeline type was new for the 2024 season.
|
||||
|
||||
{kind=link}
|
Before Width: | Height: | Size: 55 KiB After Width: | Height: | Size: 41 KiB |
{kind=link}
|
Before Width: | Height: | Size: 51 KiB After Width: | Height: | Size: 22 KiB |
{kind=link}
|
Before Width: | Height: | Size: 99 KiB After Width: | Height: | Size: 58 KiB |
{kind=link}
|
Before Width: | Height: | Size: 74 KiB After Width: | Height: | Size: 64 KiB |
{kind=link}
|
Before Width: | Height: | Size: 105 KiB After Width: | Height: | Size: 56 KiB |
{kind=link}
|
Before Width: | Height: | Size: 427 KiB After Width: | Height: | Size: 304 KiB |
{kind=link}
|
Before Width: | Height: | Size: 451 KiB After Width: | Height: | Size: 324 KiB |
{kind=link}
|
Before Width: | Height: | Size: 10 KiB After Width: | Height: | Size: 5.4 KiB |
@@ -6,6 +6,10 @@ PhotonVision can combine AprilTag detections from multiple simultaneously observ
|
||||
MultiTag requires an accurate field layout JSON to be uploaded! Differences between this layout and the tags' physical location will drive error in the estimated pose output.
|
||||
:::
|
||||
|
||||
:::{warning}
|
||||
For the 2025 Reefscape Season, there are two different field layouts. The first is the [welded field layout](https://github.com/wpilibsuite/allwpilib/blob/main/apriltag/src/main/native/resources/edu/wpi/first/apriltag/2025-reefscape-welded.json), which photonvision ships with. The second is the [Andymark field layout](https://github.com/wpilibsuite/allwpilib/blob/main/apriltag/src/main/native/resources/edu/wpi/first/apriltag/2025-reefscape-andymark.json). It is very important to ensure that you use the correct field layout, both in the [PhotonPoseEstimator](https://docs.photonvision.org/en/latest/docs/programming/photonlib/robot-pose-estimator.html#apriltags-and-photonposeestimator) and on the [coprocessor](https://docs.photonvision.org/en/latest/docs/apriltag-pipelines/multitag.html#updating-the-field-layout).
|
||||
:::
|
||||
|
||||
## Enabling MultiTag
|
||||
|
||||
Ensure that your camera is calibrated and 3D mode is enabled. Navigate to the Output tab and enable "Do Multi-Target Estimation". This enables MultiTag to use the uploaded field layout JSON to calculate your camera's pose in the field. This 3D transform will be shown as an additional table in the "targets" tab, along with the IDs of AprilTags used to compute this transform.
|
||||
@@ -19,30 +23,41 @@ Ensure that your camera is calibrated and 3D mode is enabled. Navigate to the Ou
|
||||
By default, enabling multi-target will disable calculating camera-to-target transforms for each observed AprilTag target to increase performance; the X/Y/angle numbers shown in the target table of the UI are instead calculated using the tag's expected location (per the field layout JSON) and the field-to-camera transform calculated using MultiTag. If you additionally want the individual camera-to-target transform calculated using SolvePNP for each target, enable "Always Do Single-Target Estimation".
|
||||
:::
|
||||
|
||||
This multi-target pose estimate can be accessed using PhotonLib. We suggest using {ref}`the PhotonPoseEstimator class <docs/programming/photonlib/robot-pose-estimator:AprilTags and PhotonPoseEstimator>` with the `MULTI_TAG_PNP_ON_COPROCESSOR` strategy to simplify code, but the transform can be directly accessed using `getMultiTagResult`/`MultiTagResult()` (Java/C++).
|
||||
This multi-target pose estimate can be accessed using PhotonLib. We suggest using {ref}`the PhotonPoseEstimator class <docs/programming/photonlib/robot-pose-estimator:AprilTags and PhotonPoseEstimator>` with the `MULTI_TAG_PNP_ON_COPROCESSOR` strategy to simplify code, but the transform can be directly accessed using `getMultiTagResult`/`MultiTagResult()`/`multitagResult` (Java/C++/Python).
|
||||
|
||||
```{eval-rst}
|
||||
.. tab-set-code::
|
||||
|
||||
.. code-block:: Java
|
||||
.. code-block:: java
|
||||
|
||||
var result = camera.getLatestResult();
|
||||
if (result.getMultiTagResult().estimatedPose.isPresent) {
|
||||
Transform3d fieldToCamera = result.getMultiTagResult().estimatedPose.best;
|
||||
var results = camera.getAllUnreadResults();
|
||||
for (var result : results) {
|
||||
var multiTagResult = result.getMultiTagResult();
|
||||
if (multiTagResult.isPresent()) {
|
||||
var fieldToCamera = multiTagResult.get().estimatedPose.best;
|
||||
}
|
||||
}
|
||||
|
||||
|
||||
.. code-block:: C++
|
||||
.. code-block:: c++
|
||||
|
||||
auto result = camera.GetLatestResult();
|
||||
if (result.MultiTagResult().result.isPresent) {
|
||||
frc::Transform3d fieldToCamera = result.MultiTagResult().result.best;
|
||||
auto results = camera.GetAllUnreadResults();
|
||||
for (auto &result : results)
|
||||
{
|
||||
auto multiTagResult = result.MultiTagResult();
|
||||
if (multiTagResult.has_value()) {
|
||||
frc::Transform3d fieldToCamera = multiTagResult->estimatedPose.best;
|
||||
}
|
||||
}
|
||||
|
||||
.. code-block:: Python
|
||||
|
||||
# Coming Soon!
|
||||
.. code-block:: python
|
||||
|
||||
results = camera.getAllUnreadResults()
|
||||
for result in results:
|
||||
multitagResult = result.multitagResult
|
||||
if multitagResult is not None:
|
||||
fieldToCamera = multitagResult.estimatedPose.best
|
||||
```
|
||||
|
||||
:::{note}
|
||||
@@ -51,7 +66,7 @@ The returned field to camera transform is a transform from the fixed field origi
|
||||
|
||||
## Updating the Field Layout
|
||||
|
||||
PhotonVision ships by default with the [2025 field layout JSON](https://github.com/wpilibsuite/allwpilib/blob/main/apriltag/src/main/native/resources/edu/wpi/first/apriltag/2025-reefscape.json). The layout can be inspected by navigating to the settings tab and scrolling down to the "AprilTag Field Layout" card, as shown below.
|
||||
PhotonVision ships by default with the [2025 welded field layout JSON](https://github.com/wpilibsuite/allwpilib/blob/main/apriltag/src/main/native/resources/edu/wpi/first/apriltag/2025-reefscape-welded.json). The layout can be inspected by navigating to the settings tab and scrolling down to the "AprilTag Field Layout" card, as shown below.
|
||||
|
||||
```{image} images/field-layout.png
|
||||
:alt: The currently saved field layout in the Photon UI
|
||||
|
||||
{kind=link}
|
Before Width: | Height: | Size: 143 KiB |
8
docs/source/docs/benchmarks/index.md
Normal file
@@ -0,0 +1,8 @@
|
||||
# Performance Benchmarks
|
||||
|
||||
```{toctree}
|
||||
:maxdepth: 0
|
||||
:titlesonly: true
|
||||
|
||||
rknn-model-benchmarks
|
||||
```
|
||||
125
docs/source/docs/benchmarks/rknn-model-benchmarks.md
Normal file
@@ -0,0 +1,125 @@
|
||||
# RKNN Benchmarks
|
||||
|
||||
## Description
|
||||
This benchmark compares the performance of four object detection models: YOLOv5, YOLOv5u, YOLOv8, and YOLOv11 on the [COCO 2017 Validation Set](http://images.cocodataset.org/zips/val2017.zip). The main purpose is to assess and compare the inference speed and detection accuracy of these models when deployed on the Orange Pi devices using the RKNN framework and int8 quantization.
|
||||
|
||||
## Methodology
|
||||
- **Dataset**: [COCO 2017 Validation Set](http://images.cocodataset.org/zips/val2017.zip) (5,000 images)
|
||||
|
||||
- **Platform**: Orange Pi 5 with RK3588
|
||||
|
||||
- **Quantization**: int8 using 20 randomly selected images from the validation set
|
||||
|
||||
- **Framework**: RKNN Toolkit 2
|
||||
|
||||
## Operator-Level Benchmark Results
|
||||
|
||||
The following tables break down the average CPU time, NPU time, and total execution time (in microseconds) for each operator used by the models. Each value represents the mean ± standard deviation across 5,000 inferences.
|
||||
|
||||
### YOLOv5
|
||||
|
||||
| OpType | CPU Time (μs) | NPU Time (μs) | Total Time (μs) | Time Ratio (%) | Number of Times Called |
|
||||
|-----------------|---------------------|----------------------|-----------------------|---------------------|-----------------------|
|
||||
| ConvExSwish | 0.00 ± 0.00 | 10968.81 ± 1126.00 | 10968.81 ± 1126.00 | 73.06 ± 0.94 | 57 |
|
||||
| ConvSigmoid | 0.00 ± 0.00 | 1243.49 ± 67.66 | 1243.49 ± 67.66 | 8.33 ± 0.57 | 3 |
|
||||
| Concat | 0.00 ± 0.00 | 1080.68 ± 259.40 | 1080.68 ± 259.40 | 7.09 ± 0.87 | 13 |
|
||||
| Conv | 0.00 ± 0.00 | 732.15 ± 29.42 | 732.15 ± 29.42 | 4.92 ± 0.42 | 1 |
|
||||
| Add | 0.00 ± 0.00 | 473.71 ± 131.48 | 473.71 ± 131.48 | 3.10 ± 0.50 | 7 |
|
||||
| MaxPool | 0.00 ± 0.00 | 272.40 ± 110.52 | 272.40 ± 110.52 | 1.76 ± 0.51 | 6 |
|
||||
| Resize | 0.00 ± 0.00 | 147.61 ± 38.89 | 147.61 ± 38.89 | 0.97 ± 0.15 | 2 |
|
||||
| OutputOperator | 106.60 ± 15.00 | 0.00 ± 0.00 | 106.60 ± 15.00 | 0.72 ± 0.13 | 3 |
|
||||
| InputOperator | 8.64 ± 1.79 | 0.00 ± 0.00 | 8.64 ± 1.79 | 0.06 ± 0.02 | 1 |
|
||||
| **Total** | **115.24 ± 16.16** | **14918.85 ± 1735.45**| **15034.09 ± 1734.28**| | **93** |
|
||||
|
||||
### YOLOv5u
|
||||
|
||||
| OpType | CPU Time (μs) | NPU Time (μs) | Total Time (μs) | Time Ratio (%) | Number of Times Called |
|
||||
|-----------------|---------------------|----------------------|-----------------------|---------------------|-----------------------|
|
||||
| ConvExSwish | 0.00 ± 0.00 | 16828.24 ± 1332.73 | 16828.24 ± 1332.73 | 83.04 ± 1.61 | 69 |
|
||||
| Concat | 0.00 ± 0.00 | 1265.94 ± 250.24 | 1265.94 ± 250.24 | 6.17 ± 0.69 | 13 |
|
||||
| ConvSigmoid | 0.00 ± 0.00 | 613.88 ± 62.97 | 613.88 ± 62.97 | 3.03 ± 0.15 | 3 |
|
||||
| Add | 0.00 ± 0.00 | 553.75 ± 131.17 | 553.75 ± 131.17 | 2.69 ± 0.44 | 7 |
|
||||
| Conv | 0.00 ± 0.00 | 298.61 ± 72.72 | 298.61 ± 72.72 | 1.45 ± 0.25 | 3 |
|
||||
| ConvClip | 0.00 ± 0.00 | 256.02 ± 64.48 | 256.02 ± 64.48 | 1.24 ± 0.23 | 3 |
|
||||
| MaxPool | 0.00 ± 0.00 | 178.68 ± 58.72 | 178.68 ± 58.72 | 0.86 ± 0.23 | 3 |
|
||||
| Resize | 0.00 ± 0.00 | 170.87 ± 40.14 | 170.87 ± 40.14 | 0.83 ± 0.13 | 2 |
|
||||
| OutputOperator | 126.89 ± 16.53 | 0.00 ± 0.00 | 126.89 ± 16.53 | 0.63 ± 0.10 | 9 |
|
||||
| InputOperator | 8.69 ± 1.45 | 0.00 ± 0.00 | 8.69 ± 1.45 | 0.04 ± 0.01 | 1 |
|
||||
| **Total** | **135.57 ± 17.51** | **20165.99 ± 1963.70**| **20301.56 ± 1965.88**| | **113** |
|
||||
|
||||
### YOLOv8
|
||||
|
||||
| OpType | CPU Time (μs) | NPU Time (μs) | Total Time (μs) | Time Ratio (%) | Number of Times Called |
|
||||
|-----------------|---------------------|----------------------|-----------------------|---------------------|-----------------------|
|
||||
| ConvExSwish | 0.00 ± 0.00 | 13017.04 ± 1165.76 | 13017.04 ± 1165.76 | 75.66 ± 1.96 | 57 |
|
||||
| Concat | 0.00 ± 0.00 | 1489.94 ± 257.22 | 1489.94 ± 257.22 | 8.58 ± 0.53 | 13 |
|
||||
| Split | 0.00 ± 0.00 | 681.47 ± 166.62 | 681.47 ± 166.62 | 3.89 ± 0.53 | 8 |
|
||||
| ConvSigmoid | 0.00 ± 0.00 | 596.08 ± 75.01 | 596.08 ± 75.01 | 3.45 ± 0.18 | 3 |
|
||||
| Add | 0.00 ± 0.00 | 443.60 ± 118.05 | 443.60 ± 118.05 | 2.53 ± 0.41 | 6 |
|
||||
| Conv | 0.00 ± 0.00 | 269.61 ± 78.65 | 269.61 ± 78.65 | 1.54 ± 0.30 | 3 |
|
||||
| Resize | 0.00 ± 0.00 | 236.79 ± 37.74 | 236.79 ± 37.74 | 1.37 ± 0.08 | 2 |
|
||||
| ConvClip | 0.00 ± 0.00 | 231.82 ± 68.44 | 231.82 ± 68.44 | 1.32 ± 0.27 | 3 |
|
||||
| MaxPool | 0.00 ± 0.00 | 156.85 ± 56.94 | 156.85 ± 56.94 | 0.89 ± 0.23 | 3 |
|
||||
| OutputOperator | 124.86 ± 20.74 | 0.00 ± 0.00 | 124.86 ± 20.74 | 0.73 ± 0.15 | 9 |
|
||||
| InputOperator | 8.47 ± 1.66 | 0.00 ± 0.00 | 8.47 ± 1.66 | 0.05 ± 0.01 | 1 |
|
||||
| **Total** | **133.33 ± 21.95** | **17123.19 ± 1985.72**| **17256.52 ± 1986.77** | | **108** |
|
||||
|
||||
---
|
||||
|
||||
### YOLOv11
|
||||
|
||||
| OpType | CPU Time (μs) | NPU Time (μs) | Total Time (μs) | Time Ratio (%) | Number of Times Called |
|
||||
|-----------------|---------------------|----------------------|-----------------------|---------------------|-----------------------|
|
||||
| ConvExSwish | 0.00 ± 0.00 | 16034.00 ± 1331.95 | 16034.00 ± 1331.95 | 69.90 ± 1.55 | 77 |
|
||||
| Concat | 0.00 ± 0.00 | 1888.89 ± 293.99 | 1888.89 ± 293.99 | 8.17 ± 0.51 | 17 |
|
||||
| exSDPAttention | 0.00 ± 0.00 | 1210.88 ± 17.73 | 1210.88 ± 17.73 | 5.32 ± 0.52 | 1 |
|
||||
| Split | 0.00 ± 0.00 | 908.30 ± 183.92 | 908.30 ± 183.92 | 3.91 ± 0.45 | 10 |
|
||||
| Add | 0.00 ± 0.00 | 871.64 ± 212.79 | 871.64 ± 212.79 | 3.73 ± 0.60 | 12 |
|
||||
| ConvSigmoid | 0.00 ± 0.00 | 617.61 ± 59.61 | 617.61 ± 59.61 | 2.69 ± 0.16 | 3 |
|
||||
| Conv | 0.00 ± 0.00 | 419.72 ± 89.88 | 419.72 ± 89.88 | 1.80 ± 0.24 | 5 |
|
||||
| Resize | 0.00 ± 0.00 | 272.09 ± 49.91 | 272.09 ± 49.91 | 1.18 ± 0.12 | 2 |
|
||||
| ConvClip | 0.00 ± 0.00 | 260.08 ± 59.12 | 260.08 ± 59.12 | 1.12 ± 0.18 | 3 |
|
||||
| MaxPool | 0.00 ± 0.00 | 181.93 ± 53.32 | 181.93 ± 53.32 | 0.78 ± 0.18 | 3 |
|
||||
| OutputOperator | 131.48 ± 22.93 | 0.00 ± 0.00 | 131.48 ± 22.93 | 0.58 ± 0.12 | 9 |
|
||||
| ConvAdd | 0.00 ± 0.00 | 126.79 ± 35.28 | 126.79 ± 35.28 | 0.54 ± 0.11 | 2 |
|
||||
| Reshape | 0.00 ± 0.00 | 56.61 ± 18.03 | 56.61 ± 18.03 | 0.24 ± 0.06 | 3 |
|
||||
| InputOperator | 8.66 ± 1.59 | 0.00 ± 0.00 | 8.66 ± 1.59 | 0.04 ± 0.01 | 1 |
|
||||
| **Total** | **140.14 ± 24.26** | **22848.54 ± 2351.95**| **22988.68 ± 2355.97**| | **148** |
|
||||
|
||||
|
||||
## Model Summary and Accuracy Metrics
|
||||
|
||||
The table below summarizes the mean average precision (mAP) and total inference time for each model. These metrics provide a high-level view of how each model performs in terms of both detection accuracy and runtime efficiency.
|
||||
|
||||
### Mean Average Precision (mAP) by Model
|
||||
|
||||
| Metric | YOLOv5 | YOLOv5u | YOLOv8 | YOLOv11 |
|
||||
|--------|------------|------------|------------|------------|
|
||||
| **mAP** | 0.2243 | 0.2745 | 0.3051 | 0.3251 |
|
||||
| **mAP50** | 0.3538 | 0.3834 | 0.4145 | 0.4406 |
|
||||
| **mAP75** | 0.2432 | 0.2997 | 0.3349 | 0.3568 |
|
||||
| **mAP85** | 0.3054 | 0.3472 | 0.3867 | 0.4068 |
|
||||
| **mAP95** | 0.3708 | 0.4822 | 0.5483 | 0.5858 |
|
||||
|
||||
### Model Execution Time and Call Frequency
|
||||
|
||||
| Model | Total Time (μs) | Number of Processing Calls |
|
||||
|---------|------------------------|----------------------------|
|
||||
| **YOLOv5** | 15034.09 ± 1734.28 | 93 |
|
||||
| **YOLOv5u** | 20301.56 ± 1965.88 | 113 |
|
||||
| **YOLOv8** | 17256.52 ± 1986.77 | 108 |
|
||||
| **YOLOv11** | 22988.68 ± 2355.97 | 148 |
|
||||
|
||||
## Conclusion
|
||||
|
||||
The benchmark reveals a clear performance trade-off between inference time and detection accuracy:
|
||||
|
||||
- **YOLOv5** is the fastest model with the lowest total inference time, making it well-suited for situations where speed is more important than high detection precision.
|
||||
|
||||
- **YOLOv11** achieves the highest accuracy (mAP) across all IoU thresholds but comes with the longest inference time, which may limit its use in real-time applications.
|
||||
|
||||
- **YOLOv8** offers a strong balance between speed and accuracy, making it a practical choice when both factors matter.
|
||||
|
||||
- **YOLOv5u** improves accuracy compared to YOLOv5 but falls behind YOLOv8 in both speed and detection quality.
|
||||
|
||||
When choosing a model for edge devices like the Orange Pi 5, it’s important to weigh how much latency your system can tolerate versus how much accuracy you need. A faster model may give quicker results, while a more accurate one may offer better detection reliability, but at the cost of speed.
|
||||
@@ -4,7 +4,7 @@
|
||||
In order to detect AprilTags and use 3D mode, your camera must be calibrated at the desired resolution! Inaccurate calibration will lead to poor performance.
|
||||
:::
|
||||
|
||||
To calibrate a camera, images of a Charuco board (or chessboard) are taken. By comparing where the grid corners should be in object space (for example, a corner once every inch in an 8x6 grid) with where they appear in the camera image, we can find a least-squares estimate for intrinsic camera properties like focal lengths, center point, and distortion coefficients. For more on camera calibration, please review the [OpenCV documentation](https://docs.opencv.org/4.x/dc/dbb/tutorial_py_calibration.html).
|
||||
To calibrate a camera, images of a ChArUco board (or chessboard) are taken. By comparing where the grid corners should be in object space (for example, a corner once every inch in an 8x6 grid) with where they appear in the camera image, we can find a least-squares estimate for intrinsic camera properties like focal lengths, center point, and distortion coefficients. For more on camera calibration, please review the [OpenCV documentation](https://docs.opencv.org/4.x/dc/dbb/tutorial_py_calibration.html).
|
||||
|
||||
:::{warning}
|
||||
While any resolution can be calibrated, higher resolutions may be too performance-intensive for some coprocessors to handle. Therefore, we recommend experimenting to see what works best for your coprocessor.
|
||||
@@ -16,9 +16,13 @@ The calibration data collected during calibration is specific to each physical c
|
||||
|
||||
## Calibration Tips
|
||||
|
||||
:::{warning}
|
||||
The usage of chessboards can result in bad calibration results if multiple similar images are taken. We strongly recommend that teams use ChArUco boards instead!
|
||||
:::
|
||||
|
||||
Accurate camera calibration is required in order to get accurate pose measurements when using AprilTags and 3D mode. The tips below should help ensure success:
|
||||
|
||||
01. Ensure your the images you take have the target in different positions and angles, with as big of a difference between angles as possible. It is important to make sure the target overlay still lines up with the board while doing this. Tilt no more than 45 degrees.
|
||||
01. Ensure the images you take have the target in different positions and angles, with as big of a difference between angles as possible. It is important to make sure the target overlay still lines up with the board while doing this. Tilt no more than 45 degrees.
|
||||
02. Use as big of a calibration target as your printer can print.
|
||||
03. Ensure that your printed pattern has enough white border around it.
|
||||
04. Ensure your camera stays in one position during the duration of the calibration.
|
||||
@@ -34,11 +38,11 @@ Following the ideas above should help in getting an accurate calibration.
|
||||
|
||||
### 1. Navigate to the calibration section in the UI.
|
||||
|
||||
The Cameras tab of the UI houses PhotonVision's camera calibration tooling. It assists users with calibrating their cameras, as well as allows them to view previously calibrated resolutions. We support both charuco and chessboard calibrations.
|
||||
The Cameras tab of the UI houses PhotonVision's camera calibration tooling. It assists users with calibrating their cameras, as well as allows them to view previously calibrated resolutions. We support both ChArUco and chessboard calibrations.
|
||||
|
||||
### 2. Print out the calibration target.
|
||||
|
||||
In the Camera Calibration tab, we'll print out the calibration target using the "Download" button. This should be printed on 8.5x11 printer paper. This page shows using an 8x8 charuco board (or chessboard depending on the selected calibration type).
|
||||
In the Camera Calibration tab, we'll print out the calibration target using the "Download" button. This should be printed on 8.5x11 printer paper. This page shows using an 8x8 ChArUco board (or chessboard depending on the selected calibration type).
|
||||
|
||||
:::{warning}
|
||||
Ensure that there is no scaling applied during printing (it should be at 100%) and that the PDF is printed as is on regular printer paper. Check the square size with calipers or an accurate measuring device after printing to ensure squares are sized properly, and enter the true size of the square in the UI text box. For optimal results, various resources are available online to calibrate your specific printer if needed.
|
||||
@@ -46,11 +50,15 @@ Ensure that there is no scaling applied during printing (it should be at 100%) a
|
||||
|
||||
### 3. Select calibration resolution and fill in appropriate target data.
|
||||
|
||||
We'll next select a resolution to calibrate and populate our pattern spacing, marker size, and board size. The provided chessboard and charuco board are an 8x8 grid of 1 inch square. The provided charuco board uses the 4x4 dictionary with a marker size of 0.75 inches (this board does not need the old OpenCV pattern selector selected). Printers are not perfect, and you need to measure your calibration target and enter the correct marker size (size of the aruco marker) and pattern spacing (aka size of the black square) using calipers or similar. Finally, once our entered data is correct, we'll click "start calibration."
|
||||
We'll next select a resolution to calibrate and populate our pattern spacing, marker size, and board size. The provided chessboard and ChArUco board are an 8x8 grid of 1 inch square. The provided ChArUco board uses the 4x4 dictionary with a marker size of 0.75 inches (this board does not need the old OpenCV pattern selector selected). Printers are not perfect, and you need to measure your calibration target and enter the correct marker size (size of the ArUco marker) and pattern spacing (aka size of the black square) using calipers or similar. Finally, once our entered data is correct, we'll click "start calibration."
|
||||
|
||||
:::{warning} Old OpenCV Pattern selector. This should be used in the case that the calibration image is generated from a version of OpenCV before version 4.6.0. This would include targets created by calib.io. If this selector is not set correctly the calibration will be completely invalid. For more info view [this GitHub issue](https://github.com/opencv/opencv_contrib/issues/3291).
|
||||
:::
|
||||
|
||||
:::{note}
|
||||
If you have a [calib.io](https://calib.io/) ChArUco Target you will have to enter the paramaters of your target. For example if your target says "9x12 | Checker Size: 30 mm | Marker Size: 22 mm | Dictionary: ArUco DICT 5x5", you would have to set the board type to Dict_5x5_1000, the pattern spacing to 1.1811 in (30 mm converted to inches), the marker size 0.866142 in (22 mm converted to inches), the board width to 12 and the board height to 9. If you chose the wrong tag family the board wont be detected during calibration. If you swap the width and height your calibration will have a very high error.
|
||||
:::
|
||||
|
||||
### 4. Take at calibration images from various angles.
|
||||
|
||||
Now, we'll capture images of our board from various angles. It's important to check that the board overlay matches the board in your image. The further the overdrawn points are from the true position of the chessboard corners, the less accurate the final calibration will be. We'll want to capture enough images to cover the whole camera's FOV (with a minimum of 12). Once we've got our images, we'll click "Finish calibration" and wait for the calibration process to complete. If all goes well, the mean error and FOVs will be shown in the table on the right. The FOV should be close to the camera's specified FOV (usually found in a datasheet) usually within + or - 10 degrees. The mean error should also be low, usually less than 1 pixel.
|
||||
|
||||
{kind=link}
|
Before Width: | Height: | Size: 462 KiB After Width: | Height: | Size: 375 KiB |
{kind=link}
|
Before Width: | Height: | Size: 163 KiB After Width: | Height: | Size: 118 KiB |
@@ -1,5 +1,9 @@
|
||||
# Arducam Cameras
|
||||
|
||||
:::{warning}
|
||||
Arducam Pivariety cameras are **incompatible** with PhotonVision as they require a custom camera library not compatible with PhotonVision.
|
||||
:::
|
||||
|
||||
Arducam cameras are supported for setups with multiple devices. This is possible because Arducam provides software that allows you to assign truly different device names to each camera. This feature is particularly useful in complex setups where multiple cameras are used simultaneously.
|
||||
|
||||
## Setting Up Arducam Cameras
|
||||
{kind=link}
|
After Width: | Height: | Size: 34 KiB |
{kind=link}
|
After Width: | Height: | Size: 86 KiB |
8
docs/source/docs/camera-specific-configuration/index.md
Normal file
@@ -0,0 +1,8 @@
|
||||
# Camera-Specific Configuration
|
||||
|
||||
```{toctree}
|
||||
:maxdepth: 2
|
||||
|
||||
arducam-cameras
|
||||
picamconfig
|
||||
```
|
||||
@@ -23,6 +23,7 @@ Windows may report "There is a problem with this drive". This should be ignored.
|
||||
Locate `config.txt` in the folder, and open it with your favorite text editor.
|
||||
|
||||
```{image} images/bootConfigTxt.png
|
||||
|
||||
```
|
||||
|
||||
Within the file, find this block of text:
|
||||
{kind=link}
|
Before Width: | Height: | Size: 92 KiB After Width: | Height: | Size: 52 KiB |
{kind=link}
|
Before Width: | Height: | Size: 87 KiB After Width: | Height: | Size: 52 KiB |
{kind=link}
|
Before Width: | Height: | Size: 42 KiB After Width: | Height: | Size: 23 KiB |
{kind=link}
|
Before Width: | Height: | Size: 334 KiB After Width: | Height: | Size: 197 KiB |
@@ -12,17 +12,15 @@ This section contains the build instructions from the source code available at [
|
||||
|
||||
**Node JS:**
|
||||
|
||||
The UI is written in Node JS. To compile the UI, Node 18.20.4 to Node 20.0.0 is required. To install Node JS follow the instructions for your platform [on the official Node JS website](https://nodejs.org/en/download/). However, modify this line
|
||||
The UI is written in Node JS. To compile the UI, Node 22 or later is required. To install Node JS, follow the instructions for your platform [on the official Node JS website](https://nodejs.org/en/download/).
|
||||
|
||||
```bash
|
||||
nvm install 20
|
||||
```
|
||||
**pnpm:**
|
||||
|
||||
so that it instead reads
|
||||
[pnpm](https://pnpm.io/) is the package manager used to download dependencies for the UI. To install pnpm, follow [the instructions on the official pnpm website](https://pnpm.io/installation).
|
||||
|
||||
```javascript
|
||||
nvm install 18.20.4
|
||||
```
|
||||
**Cross-Compilation Toolchains (Optional):**
|
||||
|
||||
If you plan to deploy PhotonVision to a coprocessor like a Raspberry Pi, you will need to install the appropriate cross-compilation toolchain for your platform. For `linuxarm64` devices, this can be accomplished by running `./gradlew installArm64Toolchain` in the root folder of the project.
|
||||
|
||||
## Compiling Instructions
|
||||
|
||||
@@ -46,29 +44,19 @@ or alternatively download the source code from GitHub and extract the zip:
|
||||
In the photon-client directory:
|
||||
|
||||
```bash
|
||||
npm install
|
||||
pnpm install
|
||||
```
|
||||
|
||||
### Build and Copy UI to Java Source
|
||||
### Using hot reload on the UI
|
||||
|
||||
In the root directory:
|
||||
In the photon-client directory:
|
||||
|
||||
```{eval-rst}
|
||||
.. tab-set::
|
||||
|
||||
.. tab-item:: Linux
|
||||
|
||||
``./gradlew buildAndCopyUI``
|
||||
|
||||
.. tab-item:: macOS
|
||||
|
||||
``./gradlew buildAndCopyUI``
|
||||
|
||||
.. tab-item:: Windows (cmd)
|
||||
|
||||
``gradlew buildAndCopyUI``
|
||||
```bash
|
||||
pnpm run dev
|
||||
```
|
||||
|
||||
This allows you to make UI changes quickly without having to spend time rebuilding the jar. Hot reload is enabled, so changes that you make and save are reflected in the UI immediately. Running this command will give you the URL for accessing the UI, which is on a different port than normal. You must use the printed URL to use hot reload.
|
||||
|
||||
### Build and Run PhotonVision
|
||||
|
||||
To compile and run the project, issue the following command in the root directory:
|
||||
@@ -77,14 +65,17 @@ To compile and run the project, issue the following command in the root director
|
||||
.. tab-set::
|
||||
|
||||
.. tab-item:: Linux
|
||||
:sync: linux
|
||||
|
||||
``./gradlew run``
|
||||
|
||||
.. tab-item:: macOS
|
||||
:sync: macos
|
||||
|
||||
``./gradlew run``
|
||||
|
||||
.. tab-item:: Windows (cmd)
|
||||
:sync: windows
|
||||
|
||||
``gradlew run``
|
||||
```
|
||||
@@ -95,21 +86,24 @@ Running the following command under the root directory will build the jar under
|
||||
.. tab-set::
|
||||
|
||||
.. tab-item:: Linux
|
||||
:sync: linux
|
||||
|
||||
``./gradlew shadowJar``
|
||||
|
||||
.. tab-item:: macOS
|
||||
:sync: macos
|
||||
|
||||
``./gradlew shadowJar``
|
||||
|
||||
.. tab-item:: Windows (cmd)
|
||||
:sync: windows
|
||||
|
||||
``gradlew shadowJar``
|
||||
```
|
||||
|
||||
### Build and Run PhotonVision on a Raspberry Pi Coprocessor
|
||||
|
||||
As a convenience, the build has a built-in `deploy` command which builds, deploys, and starts the current source code on a coprocessor.
|
||||
As a convenience, the build has a built-in `deploy` command which builds, deploys, and starts the current source code on a coprocessor. It uses [deploy-utils](https://github.com/wpilibsuite/deploy-utils/blob/main/README.md), so it works very similarly to deploys on robot projects.
|
||||
|
||||
An architecture override is required to specify the deploy target's architecture.
|
||||
|
||||
@@ -117,18 +111,21 @@ An architecture override is required to specify the deploy target's architecture
|
||||
.. tab-set::
|
||||
|
||||
.. tab-item:: Linux
|
||||
:sync: linux
|
||||
|
||||
``./gradlew clean``
|
||||
|
||||
``./gradlew deploy -PArchOverride=linuxarm64``
|
||||
|
||||
.. tab-item:: macOS
|
||||
:sync: macos
|
||||
|
||||
``./gradlew clean``
|
||||
|
||||
``./gradlew deploy -PArchOverride=linuxarm64``
|
||||
|
||||
.. tab-item:: Windows (cmd)
|
||||
:sync: windows
|
||||
|
||||
``gradlew clean``
|
||||
|
||||
@@ -147,14 +144,17 @@ The photonlib source can be published to your local maven repository after build
|
||||
.. tab-set::
|
||||
|
||||
.. tab-item:: Linux
|
||||
:sync: linux
|
||||
|
||||
``./gradlew publishToMavenLocal``
|
||||
|
||||
.. tab-item:: macOS
|
||||
:sync: macos
|
||||
|
||||
``./gradlew publishToMavenLocal``
|
||||
|
||||
.. tab-item:: Windows (cmd)
|
||||
:sync: windows
|
||||
|
||||
``gradlew publishToMavenLocal``
|
||||
```
|
||||
@@ -177,6 +177,29 @@ With the VSCode [Extension Pack for Java](https://marketplace.visualstudio.com/i
|
||||
|
||||
To correctly run PhotonVision tests this way, you must [delegate the tests to Gradle](https://code.visualstudio.com/docs/java/java-build#_delegate-tests-to-gradle). Debugging tests like this will [**not** currently](https://github.com/microsoft/build-server-for-gradle/issues/119) collect outputs.
|
||||
|
||||
### Running Tests With UI
|
||||
|
||||
By default, tests are run with UI disabled so they are not obtrusive during a build. All tests should be useful when the UI is disabled. However, if a particular test would benefit from having UI access (i.e. for debugging info), the UI can be enabled by passing the `enableTestUi` project property to Gradle. This will run all tests by default, but the Gradle `--tests` option can be used to [filter for specific tests](https://docs.gradle.org/current/userguide/java_testing.html#test_filtering).
|
||||
|
||||
```{eval-rst}
|
||||
.. tab-set::
|
||||
|
||||
.. tab-item:: Linux
|
||||
:sync: linux
|
||||
|
||||
``./gradlew test -PenableTestUi``
|
||||
|
||||
.. tab-item:: macOS
|
||||
:sync: macos
|
||||
|
||||
``./gradlew test -PenableTestUi``
|
||||
|
||||
.. tab-item:: Windows (cmd)
|
||||
:sync: windows
|
||||
|
||||
``gradlew test -PenableTestUi``
|
||||
```
|
||||
|
||||
### Debugging PhotonVision Running Locally
|
||||
|
||||
Unit tests can instead be debugged through the ``test`` Gradle task for a specific subproject in VSCode, found in the Gradle tab:
|
||||
@@ -197,7 +220,7 @@ Similarly, a local instance of PhotonVision can be debugged in the same way usin
|
||||
|
||||
Set up a VSCode configuration in {code}`launch.json`
|
||||
|
||||
```
|
||||
```json
|
||||
{
|
||||
// Use IntelliSense to learn about possible attributes.
|
||||
// Hover to view descriptions of existing attributes.
|
||||
@@ -273,3 +296,15 @@ Using the [GitHub CLI](https://cli.github.com/), we can download artifacts from
|
||||
```
|
||||
~/photonvision$ gh run download 11759699679 -n jar-Linux
|
||||
```
|
||||
|
||||
#### MacOS Builds
|
||||
|
||||
MacOS builds are not published to releases as MacOS is not an officially
|
||||
supported platform. However, MacOS builds are still available from the MacOS
|
||||
build action, which can be found [here](https://github.com/PhotonVision/photonvision/actions/workflows/build.yml).
|
||||
|
||||
#### Forcing Object Detection in the UI
|
||||
|
||||
In order to force the Object Detection interface to be visible, it's necessary to hardcode the platform that `Platform.java` returns. This can be done by changing the function that detects the RK3588S/QCS6490 platform to always return true, and changing the `getCurrentPlatform()` function to always return the RK3588S/QCS6490 architecture.
|
||||
Alternatively, it's possible to modify the frontend code by changing all instances of `useSettingsStore().general.supportedBackends.length > 0` to `true`, which will force the card to render.
|
||||
Make sure to revert these changes before submitting a Pull Request.
|
||||
|
||||
@@ -4,7 +4,7 @@ Diagrams generated by the [PlantUML UML editor](https://www.plantuml.com/plantum
|
||||
|
||||
## Initial Setup
|
||||
|
||||
When PhotonVision first starts, settings are loaded from disk and [VisionSources](https://javadocs.photonvision.org/org/photonvision/vision/processes/VisionSource.html) are created for every serialized & active [Camera Configuration](https://javadocs.photonvision.org/org/photonvision/common/configuration/CameraConfiguration.html)
|
||||
When PhotonVision first starts, settings are loaded from disk and [VisionSources](https://javadocs.photonvision.org/release/org/photonvision/vision/processes/VisionSource.html) are created for every serialized & active [Camera Configuration](https://javadocs.photonvision.org/release/org/photonvision/common/configuration/CameraConfiguration.html)
|
||||
|
||||
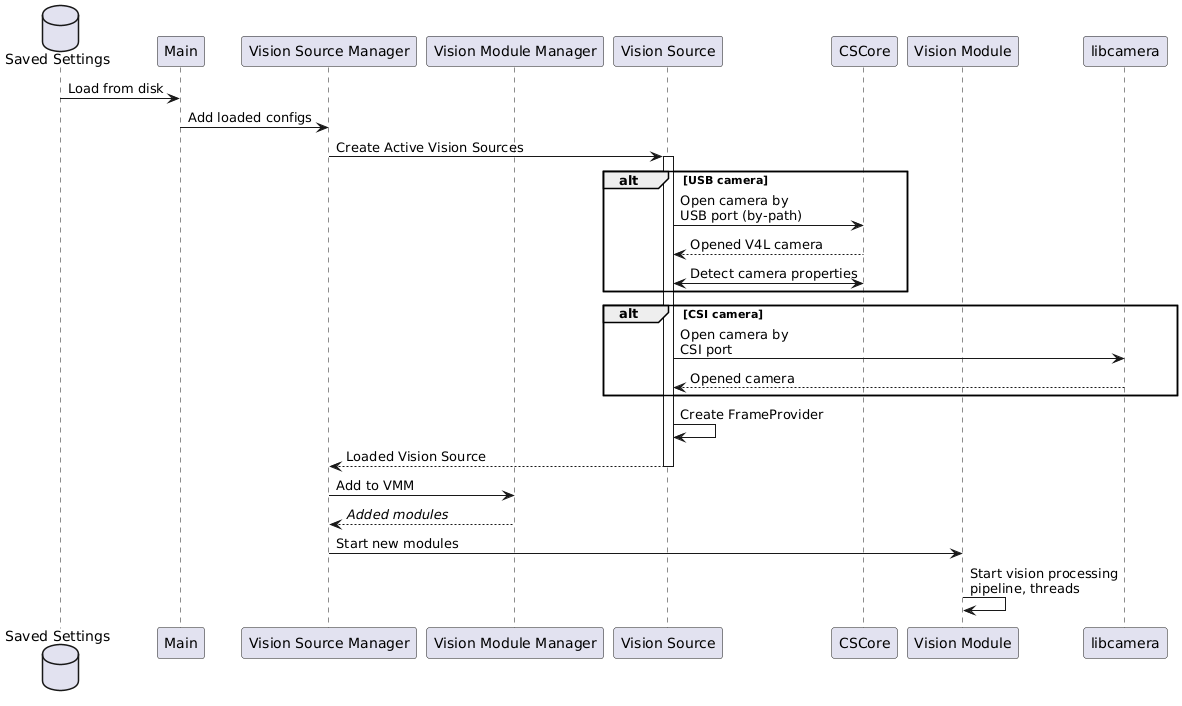
|
||||
|
||||
|
||||
{kind=link}
|
Before Width: | Height: | Size: 14 KiB After Width: | Height: | Size: 5.9 KiB |
{kind=link}
|
Before Width: | Height: | Size: 215 KiB After Width: | Height: | Size: 166 KiB |
@@ -3,6 +3,7 @@
|
||||
```{toctree}
|
||||
building-photon
|
||||
building-docs
|
||||
linting
|
||||
developer-docs/index
|
||||
design-descriptions/index
|
||||
```
|
||||
|
||||
43
docs/source/docs/contributing/linting.md
Normal file
@@ -0,0 +1,43 @@
|
||||
# Linting the PhotonVision Codebase
|
||||
|
||||
## Versions
|
||||
|
||||
:::{note}
|
||||
If you work on other projects that use different versions of the same linters as PhotonVision, you may find it beneficial to use a [venv](https://docs.python.org/3/library/venv.html) instead of installing the linters globally. This will allow you to have different versions of the same linter installed for different projects.
|
||||
:::
|
||||
|
||||
The correct versions for each linter can be found under the linting workflow located [here](https://github.com/PhotonVision/photonvision/tree/main/.github/workflows). For *doc8*, the version can be found in `docs/requirements.txt`. If you've linted, and are still unable to pass CI, please check the versions of your linters.
|
||||
|
||||
## Frontend
|
||||
|
||||
### Linting the frontend
|
||||
|
||||
In order to lint the frontend, run `pnpm -C photon-client lint && pnpm -C photon-client format`. This should be done from the base level of the repo.
|
||||
|
||||
## Backend
|
||||
|
||||
### wpiformat installation
|
||||
|
||||
To lint the backend, PhotonVision uses *wpiformat* and *spotless*. Spotless is included with gradle, which means installation is not needed. To install wpiformat, run `pipx install wpiformat`. To install a specific version, run `pipx install wpiformat==<version>`.
|
||||
|
||||
### Linting the backend
|
||||
|
||||
To lint, run `./gradlew spotlessApply` and `wpiformat`.
|
||||
|
||||
## Documentation
|
||||
|
||||
### doc8 installation
|
||||
|
||||
To install *doc8*, the python tool we use to lint our documentation, run `pipx install doc8`. To install a specific version, run `pipx install doc8==<version>`.
|
||||
|
||||
### Linting the documentation
|
||||
|
||||
To lint the documentation, run `doc8 docs` from the root level of the docs.
|
||||
|
||||
## Alias
|
||||
|
||||
The following [alias](https://www.computerworld.com/article/1373210/how-to-use-aliases-in-linux-shell-commands.html) can be added to your shell config, which will allow you to lint the entirety of the PhotonVision project by running `pvLint`. The alias will work on Linux, macOS, Git Bash on Windows, and WSL.
|
||||
|
||||
```sh
|
||||
alias pvLint='wpiformat -v && ./gradlew spotlessApply && pnpm -C photon-client lint && pnpm -C photon-client format && doc8 docs'
|
||||
```
|
||||
@@ -11,7 +11,7 @@ PhotonVision has a myriad of advantages over similar solutions, including:
|
||||
|
||||
### Affordable
|
||||
|
||||
Compared to alternatives, PhotonVision is much cheaper to use (at the cost of your coprocessor and camera) compared to alternatives that cost \$400. This allows your team to save money while still being competitive.
|
||||
PhotonVision offers a more affordable solution to vision, with costs being from your coprocessor(s) and camera(s). Teams may choose to run multiple cameras from one coprocessor. This makes it a great solution for teams with limited budgets.
|
||||
|
||||
### Easy to Use User Interface
|
||||
|
||||
|
||||
BIN
docs/source/docs/driver-mode/images/crosshair-switch.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 61 KiB |
{kind=link}
|
After Width: | Height: | Size: 194 KiB |
BIN
docs/source/docs/driver-mode/images/driver-mode-dashboard.png
Normal file
{kind=link}
|
After Width: | Height: | Size: 257 KiB |
27
docs/source/docs/driver-mode/index.md
Normal file
@@ -0,0 +1,27 @@
|
||||
# Driver Mode
|
||||
|
||||
Driver Mode is a type of pipeline that doesn't run any vision processing, intended for viewing from a human.
|
||||
|
||||
## Enabling Driver Mode
|
||||
|
||||
To enable Driver Mode, toggle the switch at the top of the Dashboard page for a selected camera.
|
||||
|
||||
```{image} images/driver-mode-dashboard.png
|
||||
:align: center
|
||||
:alt: Driver Mode Toggle in the Dashboard Page
|
||||
```
|
||||
|
||||
Alternatively, visit the camera settings page and toggle the "Driver Mode" switch for a selected camera.
|
||||
|
||||
```{image} images/driver-mode-camera-settings.png
|
||||
:align: center
|
||||
:alt: Driver Mode Toggle in the Camera Settings Page
|
||||
```
|
||||
|
||||
## Hiding the Crosshair
|
||||
When Driver Mode is enabled, a green crosshair will be shown at the center of the camera stream. If you do not want to show the green crosshair at the center of the camera stream, toggle the "Crosshair" switch under the Input tab, as shown in the image below.
|
||||
|
||||
```{image} images/crosshair-switch.png
|
||||
:align: center
|
||||
:alt: Crosshair Switch
|
||||
```
|
||||
@@ -1,6 +1,6 @@
|
||||
# Combining Aiming and Getting in Range
|
||||
|
||||
The following example is from the PhotonLib example repository ([Java](https://github.com/PhotonVision/photonvision/tree/main/photonlib-java-examples/aimandrange)/[C++](https://github.com/PhotonVision/photonvision/tree/main/photonlib-cpp-examples/aimandrange)).
|
||||
The following example is from the PhotonLib example repository ([Java](https://github.com/PhotonVision/photonvision/tree/main/photonlib-java-examples/aimandrange)/[C++](https://github.com/PhotonVision/photonvision/tree/main/photonlib-cpp-examples/aimandrange)/[Python](https://github.com/PhotonVision/photonvision/tree/main/photonlib-python-examples/aimandrange))
|
||||
|
||||
## Knowledge and Equipment Needed
|
||||
|
||||
@@ -10,12 +10,14 @@ The following example is from the PhotonLib example repository ([Java](https://g
|
||||
|
||||
Now that you know how to aim toward the AprilTag, let's also drive the correct distance from the AprilTag.
|
||||
|
||||
To do this, we'll use the *pitch* of the target in the camera image and trigonometry to figure out how far away the robot is from the AprilTag. Then, like before, we'll use the P term of a PID controller to drive the robot to the correct distance.
|
||||
To do this, we'll use the _pitch_ of the target in the camera image and trigonometry to figure out how far away the robot is from the AprilTag. Then, like before, we'll use the P term of a PID controller to drive the robot to the correct distance.
|
||||
|
||||
```{eval-rst}
|
||||
.. tab-set::
|
||||
:sync-group: code
|
||||
|
||||
.. tab-item:: Java
|
||||
:sync: java
|
||||
|
||||
.. rli:: https://raw.githubusercontent.com/PhotonVision/photonvision/abe95dfaa055bbe3609f72cfcaaba0f96ee7978c/photonlib-java-examples/aimandrange/src/main/java/frc/robot/Robot.java
|
||||
:language: java
|
||||
@@ -24,6 +26,7 @@ To do this, we'll use the *pitch* of the target in the camera image and trigonom
|
||||
:lineno-start: 84
|
||||
|
||||
.. tab-item:: C++ (Header)
|
||||
:sync: c++
|
||||
|
||||
.. rli:: https://raw.githubusercontent.com/PhotonVision/photonvision/abe95dfaa055bbe3609f72cfcaaba0f96ee7978c/photonlib-cpp-examples/aimandrange/src/main/include/Robot.h
|
||||
:language: c++
|
||||
@@ -32,6 +35,7 @@ To do this, we'll use the *pitch* of the target in the camera image and trigonom
|
||||
:lineno-start: 25
|
||||
|
||||
.. tab-item:: C++ (Source)
|
||||
:sync: c++
|
||||
|
||||
.. rli:: https://raw.githubusercontent.com/PhotonVision/photonvision/abe95dfaa055bbe3609f72cfcaaba0f96ee7978c/photonlib-cpp-examples/aimandrange/src/main/cpp/Robot.cpp
|
||||
:language: c++
|
||||
@@ -40,11 +44,12 @@ To do this, we'll use the *pitch* of the target in the camera image and trigonom
|
||||
:lineno-start: 58
|
||||
|
||||
.. tab-item:: Python
|
||||
:sync: python
|
||||
|
||||
.. rli:: https://raw.githubusercontent.com/PhotonVision/photonvision/abe95dfaa055bbe3609f72cfcaaba0f96ee7978c/photonlib-python-examples/aimandrange/robot.py
|
||||
:language: python
|
||||
:lines: 44-95
|
||||
:lines: 52-91
|
||||
:linenos:
|
||||
:lineno-start: 44
|
||||
:lineno-start: 52
|
||||
|
||||
```
|
||||
|
||||
@@ -6,21 +6,23 @@ The following example is from the PhotonLib example repository ([Java](https://g
|
||||
|
||||
- A Robot
|
||||
- A camera mounted rigidly to the robot's frame, centered and pointed forward.
|
||||
- A coprocessor running PhotonVision with an AprilTag or Aruco 2D Pipeline.
|
||||
- A coprocessor running PhotonVision with an AprilTag or ArUco 2D Pipeline.
|
||||
- [A printout of AprilTag 7](https://firstfrc.blob.core.windows.net/frc2025/FieldAssets/Apriltag_Images_and_User_Guide.pdf), mounted on a rigid and flat surface.
|
||||
|
||||
## Code
|
||||
|
||||
Now that you have properly set up your vision system and have tuned a pipeline, you can now aim your robot at an AprilTag using the data from PhotonVision. The _yaw_ of the target is the critical piece of data that will be needed first.
|
||||
|
||||
Yaw is reported to the roboRIO over Network Tables. PhotonLib, our vender dependency, is the easiest way to access this data. The documentation for the Network Tables API can be found {ref}`here <docs/additional-resources/nt-api:Getting Target Information>` and the documentation for PhotonLib {ref}`here <docs/programming/photonlib/adding-vendordep:What is PhotonLib?>`.
|
||||
Yaw is reported to the roboRIO over Network Tables. PhotonLib, our vendor dependency, is the easiest way to access this data. The documentation for the Network Tables API can be found {ref}`here <docs/additional-resources/nt-api:Getting Target Information>` and the documentation for PhotonLib {ref}`here <docs/programming/photonlib/adding-vendordep:What is PhotonLib?>`.
|
||||
|
||||
In this example, while the operator holds a button down, the robot will turn towards the AprilTag using the P term of a PID loop. To learn more about how PID loops work, how WPILib implements them, and more, visit [Advanced Controls (PID)](https://docs.wpilib.org/en/stable/docs/software/advanced-control/introduction/index.html) and [PID Control in WPILib](https://docs.wpilib.org/en/stable/docs/software/advanced-controls/controllers/pidcontroller.html#pid-control-in-wpilib).
|
||||
|
||||
```{eval-rst}
|
||||
.. tab-set::
|
||||
:sync-group: code
|
||||
|
||||
.. tab-item:: Java
|
||||
:sync: java
|
||||
|
||||
.. rli:: https://raw.githubusercontent.com/PhotonVision/photonvision/abe95dfaa055bbe3609f72cfcaaba0f96ee7978c/photonlib-java-examples/aimattarget/src/main/java/frc/robot/Robot.java
|
||||
:language: java
|
||||
@@ -29,6 +31,7 @@ In this example, while the operator holds a button down, the robot will turn tow
|
||||
:lineno-start: 77
|
||||
|
||||
.. tab-item:: C++ (Header)
|
||||
:sync: c++
|
||||
|
||||
.. rli:: https://raw.githubusercontent.com/PhotonVision/photonvision/abe95dfaa055bbe3609f72cfcaaba0f96ee7978c/photonlib-cpp-examples/aimattarget/src/main/include/Robot.h
|
||||
:language: c++
|
||||
@@ -37,6 +40,7 @@ In this example, while the operator holds a button down, the robot will turn tow
|
||||
:lineno-start: 25
|
||||
|
||||
.. tab-item:: C++ (Source)
|
||||
:sync: c++
|
||||
|
||||
.. rli:: https://raw.githubusercontent.com/PhotonVision/photonvision/abe95dfaa055bbe3609f72cfcaaba0f96ee7978c/photonlib-cpp-examples/aimattarget/src/main/cpp/Robot.cpp
|
||||
:language: c++
|
||||
@@ -45,6 +49,7 @@ In this example, while the operator holds a button down, the robot will turn tow
|
||||
:lineno-start: 56
|
||||
|
||||
.. tab-item:: Python
|
||||
:sync: python
|
||||
|
||||
.. rli:: https://raw.githubusercontent.com/PhotonVision/photonvision/abe95dfaa055bbe3609f72cfcaaba0f96ee7978c/photonlib-python-examples/aimattarget/robot.py
|
||||
:language: python
|
||||
|
||||
@@ -21,32 +21,24 @@ Please reference the [WPILib documentation](https://docs.wpilib.org/en/stable/do
|
||||
We use the 2024 game's AprilTag Locations:
|
||||
|
||||
```{eval-rst}
|
||||
.. tab-set::
|
||||
.. tab-set-code::
|
||||
.. rli:: https://raw.githubusercontent.com/PhotonVision/photonvision/abe95dfaa055bbe3609f72cfcaaba0f96ee7978c/photonlib-java-examples/poseest/src/main/java/frc/robot/Vision.java
|
||||
:language: java
|
||||
:lines: 68-68
|
||||
:linenos:
|
||||
:lineno-start: 68
|
||||
|
||||
.. tab-item:: Java
|
||||
:sync: java
|
||||
.. rli:: https://raw.githubusercontent.com/PhotonVision/photonvision/abe95dfaa055bbe3609f72cfcaaba0f96ee7978c/photonlib-cpp-examples/poseest/src/main/include/Constants.h
|
||||
:language: c++
|
||||
:lines: 42-43
|
||||
:linenos:
|
||||
:lineno-start: 42
|
||||
|
||||
.. rli:: https://raw.githubusercontent.com/PhotonVision/photonvision/abe95dfaa055bbe3609f72cfcaaba0f96ee7978c/photonlib-java-examples/poseest/src/main/java/frc/robot/Vision.java
|
||||
:language: java
|
||||
:lines: 68-68
|
||||
:linenos:
|
||||
:lineno-start: 68
|
||||
|
||||
.. tab-item:: C++
|
||||
|
||||
.. rli:: https://raw.githubusercontent.com/PhotonVision/photonvision/abe95dfaa055bbe3609f72cfcaaba0f96ee7978c/photonlib-cpp-examples/poseest/src/main/include/Constants.h
|
||||
:language: c++
|
||||
:lines: 42-43
|
||||
:linenos:
|
||||
:lineno-start: 42
|
||||
|
||||
.. tab-item:: Python
|
||||
|
||||
.. rli:: https://raw.githubusercontent.com/PhotonVision/photonvision/abe95dfaa055bbe3609f72cfcaaba0f96ee7978c/photonlib-python-examples/poseest/robot.py
|
||||
:language: python
|
||||
:lines: 46-46
|
||||
:linenos:
|
||||
:lineno-start: 46
|
||||
.. rli:: https://raw.githubusercontent.com/PhotonVision/photonvision/abe95dfaa055bbe3609f72cfcaaba0f96ee7978c/photonlib-python-examples/poseest/robot.py
|
||||
:language: python
|
||||
:lines: 46-46
|
||||
:linenos:
|
||||
:lineno-start: 46
|
||||
|
||||
```
|
||||
|
||||
@@ -56,63 +48,47 @@ To incorporate PhotonVision, we need to create a {code}`PhotonCamera`:
|
||||
|
||||
|
||||
```{eval-rst}
|
||||
.. tab-set::
|
||||
.. tab-set-code::
|
||||
.. rli:: https://raw.githubusercontent.com/PhotonVision/photonvision/abe95dfaa055bbe3609f72cfcaaba0f96ee7978c/photonlib-java-examples/poseest/src/main/java/frc/robot/Vision.java
|
||||
:language: java
|
||||
:lines: 57-57
|
||||
:linenos:
|
||||
:lineno-start: 57
|
||||
|
||||
.. tab-item:: Java
|
||||
:sync: java
|
||||
.. rli:: https://raw.githubusercontent.com/PhotonVision/photonvision/abe95dfaa055bbe3609f72cfcaaba0f96ee7978c/photonlib-cpp-examples/poseest/src/main/include/Vision.h
|
||||
:language: c++
|
||||
:lines: 145-145
|
||||
:linenos:
|
||||
:lineno-start: 145
|
||||
|
||||
.. rli:: https://raw.githubusercontent.com/PhotonVision/photonvision/abe95dfaa055bbe3609f72cfcaaba0f96ee7978c/photonlib-java-examples/poseest/src/main/java/frc/robot/Vision.java
|
||||
:language: java
|
||||
:lines: 57-57
|
||||
:linenos:
|
||||
:lineno-start: 57
|
||||
|
||||
.. tab-item:: C++
|
||||
|
||||
.. rli:: https://raw.githubusercontent.com/PhotonVision/photonvision/abe95dfaa055bbe3609f72cfcaaba0f96ee7978c/photonlib-cpp-examples/poseest/src/main/include/Vision.h
|
||||
:language: c++
|
||||
:lines: 145-145
|
||||
:linenos:
|
||||
:lineno-start: 145
|
||||
|
||||
.. tab-item:: Python
|
||||
|
||||
.. rli:: https://raw.githubusercontent.com/PhotonVision/photonvision/abe95dfaa055bbe3609f72cfcaaba0f96ee7978c/photonlib-python-examples/poseest/robot.py
|
||||
:language: python
|
||||
:lines: 44-44
|
||||
:linenos:
|
||||
:lineno-start: 44
|
||||
.. rli:: https://raw.githubusercontent.com/PhotonVision/photonvision/abe95dfaa055bbe3609f72cfcaaba0f96ee7978c/photonlib-python-examples/poseest/robot.py
|
||||
:language: python
|
||||
:lines: 44-44
|
||||
:linenos:
|
||||
:lineno-start: 44
|
||||
```
|
||||
|
||||
During periodic execution, we read back camera results. If we see AprilTags in the image, we calculate the camera-measured pose of the robot and pass it to the {code}`Drivetrain`.
|
||||
|
||||
```{eval-rst}
|
||||
.. tab-set::
|
||||
.. tab-set-code::
|
||||
.. rli:: https://raw.githubusercontent.com/PhotonVision/photonvision/abe95dfaa055bbe3609f72cfcaaba0f96ee7978c/photonlib-java-examples/poseest/src/main/java/frc/robot/Robot.java
|
||||
:language: java
|
||||
:lines: 64-74
|
||||
:linenos:
|
||||
:lineno-start: 64
|
||||
|
||||
.. tab-item:: Java
|
||||
:sync: java
|
||||
.. rli:: https://raw.githubusercontent.com/PhotonVision/photonvision/abe95dfaa055bbe3609f72cfcaaba0f96ee7978c/photonlib-cpp-examples/poseest/src/main/cpp/Robot.cpp
|
||||
:language: c++
|
||||
:lines: 38-46
|
||||
:linenos:
|
||||
:lineno-start: 38
|
||||
|
||||
.. rli:: https://raw.githubusercontent.com/PhotonVision/photonvision/abe95dfaa055bbe3609f72cfcaaba0f96ee7978c/photonlib-java-examples/poseest/src/main/java/frc/robot/Robot.java
|
||||
:language: java
|
||||
:lines: 64-74
|
||||
:linenos:
|
||||
:lineno-start: 64
|
||||
|
||||
.. tab-item:: C++
|
||||
|
||||
.. rli:: https://raw.githubusercontent.com/PhotonVision/photonvision/abe95dfaa055bbe3609f72cfcaaba0f96ee7978c/photonlib-cpp-examples/poseest/src/main/cpp/Robot.cpp
|
||||
:language: c++
|
||||
:lines: 38-46
|
||||
:linenos:
|
||||
:lineno-start: 38
|
||||
|
||||
.. tab-item:: Python
|
||||
|
||||
.. rli:: https://raw.githubusercontent.com/PhotonVision/photonvision/abe95dfaa055bbe3609f72cfcaaba0f96ee7978c/photonlib-python-examples/poseest/robot.py
|
||||
:language: python
|
||||
:lines: 54-56
|
||||
:linenos:
|
||||
:lineno-start: 54
|
||||
.. rli:: https://raw.githubusercontent.com/PhotonVision/photonvision/abe95dfaa055bbe3609f72cfcaaba0f96ee7978c/photonlib-python-examples/poseest/robot.py
|
||||
:language: python
|
||||
:lines: 54-56
|
||||
:linenos:
|
||||
:lineno-start: 54
|
||||
|
||||
```
|
||||
|
||||
@@ -121,56 +97,45 @@ During periodic execution, we read back camera results. If we see AprilTags in t
|
||||
First, we create a new {code}`VisionSystemSim` to represent our camera and coprocessor running PhotonVision, and moving around our simulated field.
|
||||
|
||||
```{eval-rst}
|
||||
.. tab-set::
|
||||
.. tab-set-code::
|
||||
.. rli:: https://raw.githubusercontent.com/PhotonVision/photonvision/abe95dfaa055bbe3609f72cfcaaba0f96ee7978c/photonlib-java-examples/poseest/src/main/java/frc/robot/Vision.java
|
||||
:language: java
|
||||
:lines: 65-69
|
||||
:linenos:
|
||||
:lineno-start: 65
|
||||
|
||||
.. tab-item:: Java
|
||||
:sync: java
|
||||
.. rli:: https://raw.githubusercontent.com/PhotonVision/photonvision/abe95dfaa055bbe3609f72cfcaaba0f96ee7978c/photonlib-cpp-examples/poseest/src/main/include/Vision.h
|
||||
:language: c++
|
||||
:lines: 49-52
|
||||
:linenos:
|
||||
:lineno-start: 49
|
||||
|
||||
.. rli:: https://raw.githubusercontent.com/PhotonVision/photonvision/abe95dfaa055bbe3609f72cfcaaba0f96ee7978c/photonlib-java-examples/poseest/src/main/java/frc/robot/Vision.java
|
||||
:language: java
|
||||
:lines: 65-69
|
||||
:linenos:
|
||||
:lineno-start: 65
|
||||
.. code-block:: python
|
||||
|
||||
.. tab-item:: C++
|
||||
|
||||
.. rli:: https://raw.githubusercontent.com/PhotonVision/photonvision/abe95dfaa055bbe3609f72cfcaaba0f96ee7978c/photonlib-cpp-examples/poseest/src/main/include/Vision.h
|
||||
:language: c++
|
||||
:lines: 49-52
|
||||
:linenos:
|
||||
:lineno-start: 49
|
||||
|
||||
.. tab-item:: Python
|
||||
|
||||
# Coming Soon!
|
||||
# Coming Soon!
|
||||
|
||||
```
|
||||
|
||||
Then, we add configure the simulated vision system to match the camera system being simulated.
|
||||
|
||||
```{eval-rst}
|
||||
.. tab-set::
|
||||
.. tab-set-code::
|
||||
|
||||
.. tab-item:: Java
|
||||
:sync: java
|
||||
.. rli:: https://raw.githubusercontent.com/PhotonVision/photonvision/abe95dfaa055bbe3609f72cfcaaba0f96ee7978c/photonlib-java-examples/poseest/src/main/java/frc/robot/Vision.java
|
||||
:language: java
|
||||
:lines: 69-82
|
||||
:linenos:
|
||||
:lineno-start: 69
|
||||
|
||||
.. rli:: https://raw.githubusercontent.com/PhotonVision/photonvision/abe95dfaa055bbe3609f72cfcaaba0f96ee7978c/photonlib-java-examples/poseest/src/main/java/frc/robot/Vision.java
|
||||
:language: java
|
||||
:lines: 69-82
|
||||
:linenos:
|
||||
:lineno-start: 69
|
||||
.. rli:: https://raw.githubusercontent.com/PhotonVision/photonvision/abe95dfaa055bbe3609f72cfcaaba0f96ee7978c/photonlib-cpp-examples/poseest/src/main/include/Vision.h
|
||||
:language: c++
|
||||
:lines: 53-65
|
||||
:linenos:
|
||||
:lineno-start: 53
|
||||
|
||||
.. tab-item:: C++
|
||||
.. code-block:: python
|
||||
|
||||
.. rli:: https://raw.githubusercontent.com/PhotonVision/photonvision/abe95dfaa055bbe3609f72cfcaaba0f96ee7978c/photonlib-cpp-examples/poseest/src/main/include/Vision.h
|
||||
:language: c++
|
||||
:lines: 53-65
|
||||
:linenos:
|
||||
:lineno-start: 53
|
||||
|
||||
.. tab-item:: Python
|
||||
|
||||
# Coming Soon!
|
||||
# Coming Soon!
|
||||
```
|
||||
|
||||
|
||||
@@ -179,28 +144,23 @@ Then, we add configure the simulated vision system to match the camera system be
|
||||
During simulation, we periodically update the simulated vision system.
|
||||
|
||||
```{eval-rst}
|
||||
.. tab-set::
|
||||
.. tab-set-code::
|
||||
|
||||
.. tab-item:: Java
|
||||
:sync: java
|
||||
.. rli:: https://raw.githubusercontent.com/PhotonVision/photonvision/abe95dfaa055bbe3609f72cfcaaba0f96ee7978c/photonlib-java-examples/poseest/src/main/java/frc/robot/Robot.java
|
||||
:language: java
|
||||
:lines: 114-132
|
||||
:linenos:
|
||||
:lineno-start: 114
|
||||
|
||||
.. rli:: https://raw.githubusercontent.com/PhotonVision/photonvision/abe95dfaa055bbe3609f72cfcaaba0f96ee7978c/photonlib-java-examples/poseest/src/main/java/frc/robot/Robot.java
|
||||
:language: java
|
||||
:lines: 114-132
|
||||
:linenos:
|
||||
:lineno-start: 114
|
||||
.. rli:: https://raw.githubusercontent.com/PhotonVision/photonvision/abe95dfaa055bbe3609f72cfcaaba0f96ee7978c/photonlib-cpp-examples/poseest/src/main/cpp/Robot.cpp
|
||||
:language: c++
|
||||
:lines: 95-109
|
||||
:linenos:
|
||||
:lineno-start: 95
|
||||
|
||||
.. tab-item:: C++
|
||||
.. code-block:: python
|
||||
|
||||
.. rli:: https://raw.githubusercontent.com/PhotonVision/photonvision/abe95dfaa055bbe3609f72cfcaaba0f96ee7978c/photonlib-cpp-examples/poseest/src/main/cpp/Robot.cpp
|
||||
:language: c++
|
||||
:lines: 95-109
|
||||
:linenos:
|
||||
:lineno-start: 95
|
||||
|
||||
.. tab-item:: Python
|
||||
|
||||
# Coming Soon!
|
||||
# Coming Soon!
|
||||
```
|
||||
|
||||
The rest is done behind the scenes.
|
||||
|
||||
{kind=link}
|
Before Width: | Height: | Size: 56 KiB |
@@ -4,6 +4,5 @@
|
||||
:maxdepth: 2
|
||||
|
||||
selecting-hardware
|
||||
picamconfig
|
||||
customhardware
|
||||
```
|
||||
|
||||
@@ -43,7 +43,7 @@ A simple way to use a pose estimate is to activate robot functions automatically
|
||||
```{eval-rst}
|
||||
.. tab-set-code::
|
||||
|
||||
.. code-block:: Java
|
||||
.. code-block:: java
|
||||
|
||||
Pose3d robotPose;
|
||||
boolean launcherSpinCmd;
|
||||
|
||||
@@ -2,9 +2,9 @@
|
||||
|
||||
## How does it work?
|
||||
|
||||
PhotonVision supports object detection using neural network accelerator hardware built into Orange Pi 5/5+ coprocessors. Please note that the Orange Pi 5/5+ are the only coprocessors that are currently supported. The Neural Processing Unit, or NPU, is [used by PhotonVision](https://github.com/PhotonVision/rknn_jni/tree/main) to massively accelerate certain math operations like those needed for running ML-based object detection.
|
||||
PhotonVision supports object detection using neural network accelerator hardware, commonly known as an NPU. The two coprocessors currently supported are the {ref}`Orange Pi 5 <docs/objectDetection/opi:Orange Pi 5 (and variants) Object Detection>` and the {ref}`Rubik Pi 3 <docs/objectDetection/rubik:Rubik Pi 3 Object Detection>`.
|
||||
|
||||
For the 2025 season, PhotonVision ships with a pretrained ALGAE model. A model to detect coral is not currently stable, and interested teams should ask in the Photonvision discord.
|
||||
PhotonVision currently ships with a model trained on the [COCO dataset](https://cocodataset.org/) by [Ultralytics](https://github.com/ultralytics/ultralytics) (this model is licensed under [AGPLv3](https://www.gnu.org/licenses/agpl-3.0.en.html)). This model is meant to be used for testing and other miscellaneous purposes. It is not meant to be used in competition. For the 2025 post-season, PhotonVision also ships with a pretrained ALGAE model. A model to detect coral is available in the PhotonVision discord, but will not be distributed with PhotonVision.
|
||||
|
||||
## Tracking Objects
|
||||
|
||||
@@ -18,7 +18,7 @@ This model output means that while its fairly easy to say that "this rectangle p
|
||||
|
||||
## Tuning and Filtering
|
||||
|
||||
Compared to other pipelines, object detection exposes very few tuning handles. The Confidence slider changes the minimum confidence that the model needs to have in a given detection to consider it valid, as a number between 0 and 1 (with 0 meaning completely uncertain and 1 meaning maximally certain).
|
||||
Compared to other pipelines, object detection exposes very few tuning handles. The Confidence slider changes the minimum confidence that the model needs to have in a given detection to consider it valid, as a number between 0 and 1 (with 0 meaning completely uncertain and 1 meaning maximally certain). The Non-Maximum Suppresion (NMS) Threshold slider is used to filter out overlapping detections. Higher values mean more detections are allowed through, but may result in false positives. It's generally recommended that teams leave this set at the default, unless they find they're unable to get usable results with solely the Confidence slider.
|
||||
|
||||
```{raw} html
|
||||
<video width="85%" controls>
|
||||
@@ -33,23 +33,19 @@ The same area, aspect ratio, and target orientation/sort parameters from {ref}`r
|
||||
|
||||
Photonvision will letterbox your camera frame to 640x640. This means that if you select a resolution that is larger than 640 it will be scaled down to fit inside a 640x640 frame with black bars if needed. Smaller frames will be scaled up with black bars if needed.
|
||||
|
||||
## Training Custom Models
|
||||
It is recommended that you select a resolution that results in the smaller dimension being just greater than, or equal to, 640. Anything above this will not see any increased performance.
|
||||
|
||||
:::{warning}
|
||||
Power users only. This requires some setup, such as obtaining your own dataset and installing various tools. It's additionally advised to have a general knowledge of ML before attempting to train your own model. Additionally, this is not officially supported by Photonvision, and any problems that may arise are not attributable to Photonvision.
|
||||
:::
|
||||
## Custom Models
|
||||
|
||||
Before beginning, it is necessary to install the [rknn-toolkit2](https://github.com/airockchip/rknn-toolkit2). Then, install the relevant [Ultralytics repository](https://github.com/airockchip?tab=repositories&q=yolo&type=&language=&sort=) from this list. After training your model, export it to `rknn`. This will give you an `onnx` file, formatted for conversion. Copy this file to the relevant folder in [rknn_model_zoo](https://github.com/airockchip/rknn_model_zoo), and use the conversion script located there to convert it. If necessary, modify the script to provide the path to your training database for quantization.
|
||||
For information regarding converting custom models and supported models for each platform, refer to the page detailing information about your specific coprocessor.
|
||||
|
||||
## Uploading Custom Models
|
||||
- {ref}`Orange Pi 5 <docs/objectDetection/opi:Orange Pi 5 (and variants) Object Detection>`
|
||||
- {ref}`Rubik Pi 3 <docs/objectDetection/rubik:Rubik Pi 3 Object Detection>`
|
||||
|
||||
:::{warning}
|
||||
PhotonVision currently ONLY supports 640x640 Ultralytics YOLOv5, YOLOv8, and YOLO11 models trained and converted to `.rknn` format for RK3588 CPUs! Other models require different post-processing code and will NOT work. The model conversion process is also highly particular. Proceed with care.
|
||||
:::
|
||||
### Training Custom Models
|
||||
|
||||
In the settings, under `Device Control`, there's an option to upload a new object detection model. Naming convention
|
||||
should be `name-verticalResolution-horizontalResolution-modelType`. The
|
||||
`name` should only include alphanumeric characters, periods, and underscores. Additionally, the labels
|
||||
file ought to have the same name as the RKNN file, with `-labels` appended to the end. For
|
||||
example, if the RKNN file is named `Algae_1.03.2025-640-640-yolov5s.rknn`, the labels file should be
|
||||
named `Algae_1.03.2025-640-640-yolov5s-labels.txt`.
|
||||
PhotonVision does not offer any support for training custom models, only conversion. For information on which models are supported for a given coprocessor, use the links above.
|
||||
|
||||
### Managing Custom Models
|
||||
|
||||
Custom models can now be managed from the Object Detection tab in settings. You can upload a custom model by clicking the "Upload Model" button, selecting your model file, and filling out the property fields. Models can also be exported, both individually and in bulk. Models exported in bulk can be imported using the `import bulk` button. Models exported individually must be re-imported as an individual model, and all the relevant metadata is stored in the filename of the model.
|
||||
|
||||
{kind=link}
|
Before Width: | Height: | Size: 358 KiB After Width: | Height: | Size: 246 KiB |
@@ -1,8 +1,8 @@
|
||||
# Object Detection
|
||||
|
||||
```{toctree}
|
||||
:maxdepth: 0
|
||||
:titlesonly: true
|
||||
|
||||
about-object-detection
|
||||
opi
|
||||
rubik
|
||||
```
|
||||
|
||||
19
docs/source/docs/objectDetection/opi.md
Normal file
@@ -0,0 +1,19 @@
|
||||
# Orange Pi 5 (and variants) Object Detection
|
||||
|
||||
## How it works
|
||||
|
||||
PhotonVision runs object detection on the Orange Pi 5 by use of the RKNN model architecture, and [this JNI code](https://github.com/PhotonVision/rknn_jni).
|
||||
|
||||
## Supported models
|
||||
|
||||
PhotonVision currently ONLY supports 640x640 Ultralytics YOLOv5, YOLOv8, and YOLOv11 models trained and converted to `.rknn` format for RK3588 SOCs! Other models require different post-processing code and will NOT work.
|
||||
|
||||
## Converting Custom Models
|
||||
|
||||
:::{warning}
|
||||
Only quantized models are supported, so take care when exporting to select the option for quantization.
|
||||
:::
|
||||
|
||||
PhotonVision now ships with a {{ '[Python Notebook](https://github.com/PhotonVision/photonvision/blob/{}/scripts/rknn_conversion.ipynb)'.format(git_tag_ref) }} that you can use in [Google Colab](https://colab.research.google.com) or in a local **Linux** environment (since `rknn-toolkit2` only supports Linux). In Google Colab, you can simply paste the PhotonVision GitHub URL into the "GitHub" tab and select the `rknn_conversion.ipynb` notebook without needing to manually download anything.
|
||||
|
||||
Please ensure that the model you are attempting to convert is among the {ref}`supported models <docs/objectDetection/opi:Supported Models>` and using the PyTorch format.
|
||||
25
docs/source/docs/objectDetection/rubik.md
Normal file
@@ -0,0 +1,25 @@
|
||||
# Rubik Pi 3 Object Detection
|
||||
|
||||
## How it works
|
||||
|
||||
PhotonVision runs object detection on the Rubik Pi 3 by use of [TensorflowLite](https://github.com/tensorflow/tensorflow), and [this JNI code](https://github.com/PhotonVision/rubik_jni).
|
||||
|
||||
## Supported models
|
||||
|
||||
PhotonVision currently ONLY supports 640x640 Ultralytics YOLOv8 and YOLOv11 models trained and converted to `.tflite` format for QCS6490 SOCs! Other models require different post-processing code and will NOT work.
|
||||
|
||||
## Converting Custom Models
|
||||
|
||||
:::{warning}
|
||||
Only quantized models are supported, so take care when exporting to select the option for quantization.
|
||||
:::
|
||||
|
||||
PhotonVision now ships with a {{ '[Python Notebook](https://github.com/PhotonVision/photonvision/blob/{}/scripts/rubik_conversion.ipynb)'.format(git_tag_ref) }} that you can use in [Google Colab](https://colab.research.google.com), [Kaggle](https://kaggle.com/code), or in a local environment. In Google Colab, you can simply paste the PhotonVision GitHub URL into the "GitHub" tab and select the `rubik_conversion.ipynb` notebook without needing to manually download anything.
|
||||
|
||||
Please ensure that the model you are attempting to convert is among the {ref}`supported models <docs/objectDetection/rubik:Supported Models>` and using the PyTorch format.
|
||||
|
||||
## Benchmarking
|
||||
|
||||
Before you can perform benchmarking, it's necessary to install `tensorflow-lite-qcom-apps` with apt.
|
||||
|
||||
By SSHing into your Rubik Pi and running this command, replacing `PATH/TO/MODEL` with the path to your model, `benchmark_model --graph=src/test/resources/yolov8nCoco.tflite --external_delegate_path=/usr/lib/libQnnTFLiteDelegate.so --external_delegate_options=backend_type:htp --external_delegate_options=htp_use_conv_hmx:1 --external_delegate_options=htp_performance_mode:2` you can determine how long it takes for inference to be performed with your model.
|
||||
@@ -10,37 +10,61 @@ A vision pipeline represents a series of steps that are used to acquire an image
|
||||
|
||||
## Types of Pipelines
|
||||
|
||||
### Reflective
|
||||
### AprilTag / ArUco
|
||||
|
||||
This is the most common pipeline type and it is based on detecting targets with retroreflective tape. In the contours tab of this pipeline type, you can filter the area, width/height ratio, fullness, degree of speckle rejection.
|
||||
This pipeline type is based on detecting AprilTag fiducial markers. More information about AprilTags can be found in the [WPILib documentation](https://docs.wpilib.org/en/stable/docs/software/vision-processing/apriltag/apriltag-intro.html). This pipeline provides easy to use 3D pose information which allows localization.
|
||||
|
||||
:::{note}
|
||||
In order to get 3D Pose data about AprilTags, you are required to {ref}`calibrate your camera<docs/calibration/calibration:Calibrating Your Camera>`.
|
||||
:::
|
||||
|
||||
### Object Detection
|
||||
|
||||
This pipeline type is based on detecting objects using a neural network. The object detection pipeline uses a pre-trained model to detect objects in the camera stream.
|
||||
|
||||
:::{note}
|
||||
This pipeline type is only supported on the Orange Pi 5/5+ coprocessors due to its Neural Processing Unit used by PhotonVision to support running ML-based object detection.
|
||||
:::
|
||||
|
||||
### Driver Mode
|
||||
|
||||
Driver Mode is a type of pipeline that doesn't run any vision processing, intended for human viewing. For more information about Driver Mode, see the {ref}`Driver Mode documentation<docs/driver-mode/index:Driver Mode>`.
|
||||
|
||||
### Colored Shape
|
||||
|
||||
This pipeline type is based on detecting different shapes like circles, triangles, quadrilaterals, or a polygon. An example usage would be detecting yellow PowerCells from the 2020 FRC game. You can read more about the specific settings available in the contours page.
|
||||
|
||||
### AprilTag / AruCo
|
||||
### Reflective
|
||||
|
||||
This pipeline type is based on detecting AprilTag fiducial markers. More information about AprilTags can be found in the WPILib documentation. While being more performance intensive than the reflective and colored shape pipeline, it has the benefit of providing easy to use 3D pose information which allows localization.
|
||||
This pipeline type is based on detecting targets with reflective tape. In the contours tab of this pipeline type, you can filter the area, width/height ratio, fullness, degree of speckle rejection.
|
||||
|
||||
:::{note}
|
||||
In order to get 3D Pose data about AprilTags, you are required to {ref}`calibrate your camera<docs/calibration/calibration:Calibrating Your Camera>`.
|
||||
This pipeline type is not used anymore due to FRC's removal of retro-reflective tape from the game. It is still available as a pipeline for legacy purposes.
|
||||
:::
|
||||
|
||||
## Note About Multiple Cameras and Pipelines
|
||||
|
||||
When using more than one camera, it is important to keep in mind that all cameras run one pipeline each, all publish to NT, and all send both streams. This will have a noticeable affect on performance and we recommend users limit themselves to 1-2 cameras per coprocessor.
|
||||
|
||||
## Pipeline Steps
|
||||
## Pipeline Configuration
|
||||
|
||||
Reflective and Colored Shape Pipelines have 4 steps (represented as 4 tabs):
|
||||
Each pipeline has a set of tabs that are used to configure the pipeline. All pipelines follow a similar structure with an Input and Output tab, as well as a set of tabs that are specific to the pipeline type.
|
||||
|
||||
1. Input: This tab allows the raw camera image to be modified before it gets processed. Here, you can set exposure, brightness, gain, orientation, and resolution.
|
||||
2. Threshold (Only Reflective and Colored Shape): This tabs allows you to filter our specific colors/pixels in your camera stream through HSV tuning. The end goal here is having a black and white image that will only have your target lit up.
|
||||
3. Contours: After thresholding, contiguous white pixels are grouped together, and described by a curve that outlines the group. This curve is called a "contour" which represent various targets on your screen. Regardless of type, you can filter how the targets are grouped, their intersection, and how the targets are sorted. Other available filters will change based on different pipeline types.
|
||||
4. Output: Now that you have filtered all of your contours, this allows you to manipulate the detected target via orientation, the offset point, and offset.
|
||||
- Input: This tab allows the raw camera image to be modified before it gets processed. Here, you can set exposure, brightness, gain, orientation, and resolution.
|
||||
|
||||
AprilTag / AruCo Pipelines have 3 steps:
|
||||
- Output: This allows you to manipulate the detected target via the target offset point (for calculating pitch/yaw) and robot (crosshair) offset. In addition, it allows users to send additional (up to 5) outputs through PhotonLib.
|
||||
|
||||
1. Input: This is the same as the above.
|
||||
2. AprilTag: This step include AprilTag specific tuning parameters, such as decimate, blur, threads, pose iterations, and more.
|
||||
3. Output: This is the same as the above.
|
||||
Pipielines also have additional tabs that are specific to the pipeline type. Listed below are the tabs for each pipeline type.
|
||||
|
||||
### AprilTag / ArUco Pipelines
|
||||
|
||||
- AprilTag: This tab includes AprilTag specific tuning parameters, such as decimate, blur, threads, pose iterations, and more.
|
||||
|
||||
### Object Detection Pipelines
|
||||
|
||||
- Object Detection: This tab allows you to filter results from the neural network, such as confidence, area, and width/height ratio. The end goal of this tab is to filter out any false positives.
|
||||
|
||||
### Reflective and Colored Shape Pipelines
|
||||
|
||||
- Threshold: This tab allows you to filter out specific colors/pixels in your camera stream through HSV tuning. The end goal here is having a black and white image that will only have your target lit up.
|
||||
- Contours: After thresholding, contiguous white pixels are grouped together, and described by a curve that outlines the group. This curve is called a "contour" which represent various targets on your screen. Regardless of type, you can filter how the targets are grouped, their intersection, and how the targets are sorted. Other available filters will change based on different pipeline types.
|
||||
|
||||
{kind=link}
|
Before Width: | Height: | Size: 12 KiB |
@@ -8,24 +8,38 @@ PhotonLibPy is a minimal, pure-python implementation of PhotonLib.
|
||||
|
||||
## Online Install - Java/C++
|
||||
|
||||
Click on the WPI icon on the top right of your VS Code window or hit Ctrl+Shift+P (Cmd+Shift+P on macOS) to bring up the command palette. Type, "Manage Vendor Libraries" and select the "WPILib: Manage Vendor Libraries" option. Then, select the "Install new library (online)" option.
|
||||
Click on the WPILib logo in the activity bar to access the Vendor Dependencies interface.
|
||||
|
||||
```{image} images/adding-offline-library.png
|
||||
```{image} images/wpilib-vendor-dependencies.png
|
||||
:scale: 50%
|
||||
:align: center
|
||||
:alt: WPILib Vendor Dependencies
|
||||
```
|
||||
|
||||
Paste the following URL into the box that pops up:
|
||||
Select the install button for the "PhotonLib" dependency.
|
||||
|
||||
`https://maven.photonvision.org/repository/internal/org/photonvision/photonlib-json/1.0/photonlib-json-1.0.json`
|
||||
```{image} images/photonlib-install.png
|
||||
:scale: 50%
|
||||
:align: center
|
||||
:alt: PhotonLib Install Button
|
||||
```
|
||||
|
||||
:::{note}
|
||||
It is recommended to Build Robot Code at least once when connected to the Internet before heading to an area where Internet connectivity is limited (for example, a competition). This ensures that the relevant files are downloaded to your filesystem.
|
||||
The Dependency Manager will automatically build your program when it loses focus. This allows you to use the changed dependencies.
|
||||
:::
|
||||
|
||||
When an update is available for PhotonLib, a "To Latest" button will become available. This will update the vendordep to the latest version of PhotonLib.
|
||||
|
||||
```{image} images/photonlib-to-latest.png
|
||||
:align: center
|
||||
:alt: PhotonLib Update Button
|
||||
```
|
||||
|
||||
Refer to [The WPILib docs](https://docs.wpilib.org/en/stable/docs/software/vscode-overview/3rd-party-libraries.html#installing-libraries) for more details on installing vendor libraries.
|
||||
|
||||
## Offline Install - Java/C++
|
||||
|
||||
Download the latest PhotonLib release from our GitHub releases page (named something like `` photonlib-VERSION.zip` ``), and extract the contents to `$HOME/wpilib/YEAR`. This adds PhotonLib maven artifacts to your local maven repository. PhotonLib will now also appear available in the "install vendor libraries (offline)" menu in WPILib VSCode. Refer to [the WPILib docs](https://docs.wpilib.org/en/stable/docs/software/vscode-overview/3rd-party-libraries.html#installing-libraries) for more details on installing vendor libraries offline.
|
||||
Download the latest PhotonLib release from our [GitHub releases page](https://github.com/PhotonVision/photonvision/releases) (named in the format `photonlib-VERSION.zip`), and extract the contents to `~/wpilib/YYYY/vendordeps` (where YYYY is the year and ~ is `C:\Users\Public` on Windows). This adds PhotonLib maven artifacts to your local maven repository. PhotonLib will now also appear available in the "install vendor libraries (offline)" menu in WPILib VSCode. Refer to [the WPILib docs](https://docs.wpilib.org/en/stable/docs/software/vscode-overview/3rd-party-libraries.html#how-does-it-work) for more details on installing vendor libraries offline.
|
||||
|
||||
## Install - Python
|
||||
|
||||
@@ -44,5 +58,5 @@ See [The WPILib/RobotPy docs](https://docs.wpilib.org/en/stable/docs/software/py
|
||||
|
||||
In cases where you want to test a specific version of PhotonLib, make sure you have finished the steps in Online Install - Java/C++ and then manually change the version string in the PhotonLib vendordep json file(at ``/path/to/your/project/vendordep/photonlib.json``) to your desired version.
|
||||
|
||||
```{image} images/photonlib-vendordep-json.png
|
||||
```{image} images/photonlib-vendordep-json.jpg
|
||||
```
|
||||
|
||||
@@ -4,17 +4,17 @@ You can control the vision LEDs of supported hardware via PhotonLib using the `s
|
||||
|
||||
```{eval-rst}
|
||||
.. tab-set-code::
|
||||
.. code-block:: Java
|
||||
.. code-block:: java
|
||||
|
||||
// Blink the LEDs.
|
||||
camera.setLED(VisionLEDMode.kBlink);
|
||||
|
||||
.. code-block:: C++
|
||||
.. code-block:: c++
|
||||
|
||||
// Blink the LEDs.
|
||||
camera.SetLED(photonlib::VisionLEDMode::kBlink);
|
||||
|
||||
.. code-block:: Python
|
||||
.. code-block:: python
|
||||
|
||||
# Coming Soon!
|
||||
```
|
||||
|
||||
@@ -9,17 +9,17 @@ You can use the `setDriverMode()`/`SetDriverMode()` (Java and C++ respectively)
|
||||
```{eval-rst}
|
||||
.. tab-set-code::
|
||||
|
||||
.. code-block:: Java
|
||||
.. code-block:: java
|
||||
|
||||
// Set driver mode to on.
|
||||
camera.setDriverMode(true);
|
||||
|
||||
.. code-block:: C++
|
||||
.. code-block:: c++
|
||||
|
||||
// Set driver mode to on.
|
||||
camera.SetDriverMode(true);
|
||||
|
||||
.. code-block:: Python
|
||||
.. code-block:: python
|
||||
|
||||
# Coming Soon!
|
||||
```
|
||||
@@ -31,17 +31,17 @@ You can use the `setPipelineIndex()`/`SetPipelineIndex()` (Java and C++ respecti
|
||||
```{eval-rst}
|
||||
.. tab-set-code::
|
||||
|
||||
.. code-block:: Java
|
||||
.. code-block:: java
|
||||
|
||||
// Change pipeline to 2
|
||||
camera.setPipelineIndex(2);
|
||||
|
||||
.. code-block:: C++
|
||||
.. code-block:: c++
|
||||
|
||||
// Change pipeline to 2
|
||||
camera.SetPipelineIndex(2);
|
||||
|
||||
.. code-block:: Python
|
||||
.. code-block:: python
|
||||
|
||||
# Coming Soon!
|
||||
```
|
||||
@@ -52,17 +52,17 @@ You can also get the pipeline latency from a pipeline result using the `getLaten
|
||||
|
||||
```{eval-rst}
|
||||
.. tab-set-code::
|
||||
.. code-block:: Java
|
||||
.. code-block:: java
|
||||
|
||||
// Get the pipeline latency.
|
||||
double latencySeconds = result.getLatencyMillis() / 1000.0;
|
||||
|
||||
.. code-block:: C++
|
||||
.. code-block:: c++
|
||||
|
||||
// Get the pipeline latency.
|
||||
units::second_t latency = result.GetLatency();
|
||||
|
||||
.. code-block:: Python
|
||||
.. code-block:: python
|
||||
|
||||
# Coming Soon!
|
||||
```
|
||||
|
||||